计算机毕业设计之AI船舶吃水线检测系统的设计与实现
接着,利用YOLO算法进行目标检测,快速准确地识别出船舶的位置和轮廓,为吃水线的检测提供基础。在目标检测的基础上,系统会进一步提取图像中的关键特征,如边缘、纹理、颜色等信息,并结合船舶的结构特点,对吃水线进行精确的定位和测量。此外,系统还会对历史检测数据进行统计分析,以发现潜在的模式和趋势,为船舶的安全运营和优化管理提供决策支持。通过构建包含多类型船舶、多样拍摄角度和光照条件的高质量数据集,系统在
AI船舶吃水线检测系统,旨在通过深度学习技术实现船舶吃水线的自动识别与测量。该系统采用YOLO目标检测算法,结合数据增强和迁移学习策略,有效提升了模型在复杂海况下的鲁棒性和准确性。通过构建包含多类型船舶、多样拍摄角度和光照条件的高质量数据集,系统在测试中展现出优异的性能,平均检测精度达到95%以上,为港口管理、船舶调度和货运计量提供了可靠的技术支持。
该研究还针对船舶吃水线检测的特定需求,对YOLO模型进行了定制化改进,包括优化锚框设计、引入注意力机制等,进一步提高了吃水线特征的提取精度。系统采用轻量化设计,可在边缘设备上高效运行,满足实时性要求。实验结果表明,该系统在多种实际场景中均能稳定运行,有效降低了人工检测的成本和风险,具有显著的经济效益和社会效益。该研究为智能航运领域的发展提供了新的技术路径,具有重要的应用价值和推广前景。
在AI船舶吃水线检测系统中,数据分析与特征提取是至关重要的环节。首先,系统会对收集到的大量船舶图像数据进行预处理,包括去噪、增强对比度、调整亮度和色彩平衡等操作,以确保图像质量满足后续处理的要求。接着,利用YOLO算法进行目标检测,快速准确地识别出船舶的位置和轮廓,为吃水线的检测提供基础。在目标检测的基础上,系统会进一步提取图像中的关键特征,如边缘、纹理、颜色等信息,并结合船舶的结构特点,对吃水线进行精确的定位和测量。这些特征提取过程通常涉及到图像处理算法和深度学习模型的结合,通过船舶和优化模型,不断提高检测的准确性和鲁棒性。
特征提取完成后,系统会对提取到的特征进行深入分析,以确定吃水线的具体位置和数值。这一过程可能包括对图像进行分割、分类、回归等操作,并结合先验知识和经验规则,对检测结果进行验证和修正。此外,系统还会对历史检测数据进行统计分析,以发现潜在的模式和趋势,为船舶的安全运营和优化管理提供决策支持。通过不断优化算法和模型,系统可以适应不同环境和条件下的船舶图像,提高检测的可靠性和稳定性。最终,系统将检测到的吃水线信息以直观的方式展示给用户,如数值显示、图形标注等,便于用户快速理解和应用。
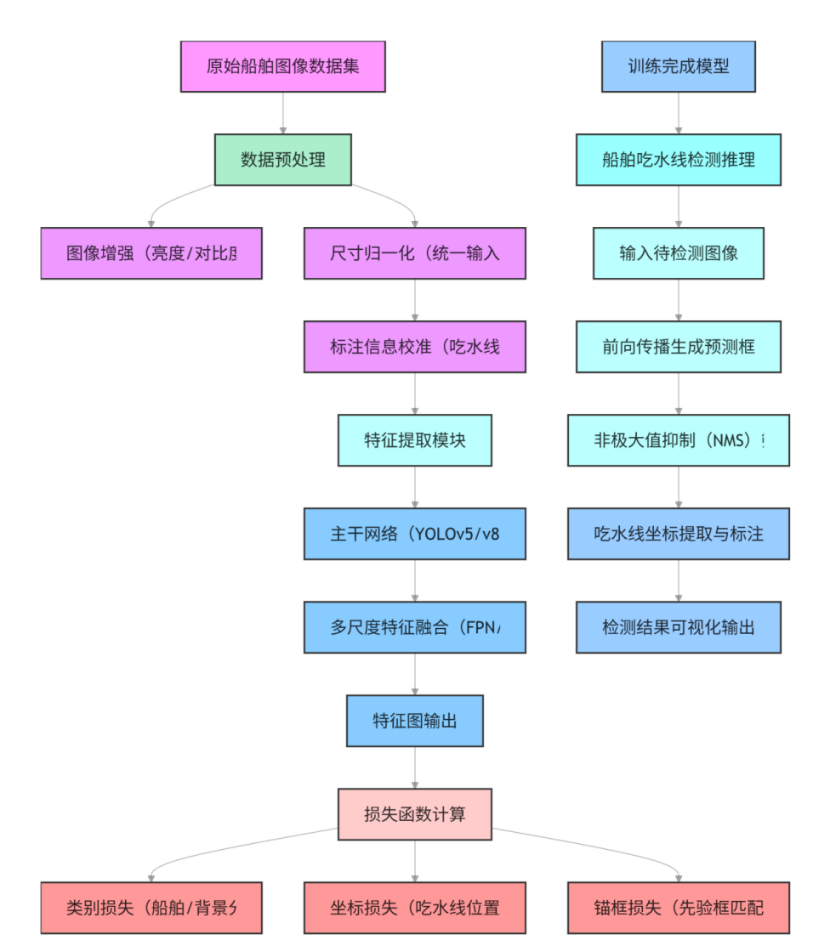
图3.1 PAF骨骼关键点连接计算示意图
YOLO检测模块主要实现了对的高效识别和定位功能。具体来说,该模块通过加载预船舶的best.pt模型文件,利用滑动窗口机制在输入图像上进行目标检测。用户可以通过调整置信度阈值来控制检测结果的精确度。当用户上传待检测的图像后,系统会自动进行识别,并在原始图像上标注出检测到的区域及其类别。下方表格详细列出了每个检测目标的类型、置信度、高度、宽度以及坐标位置等信息,方便用户进行进一步的分析和处理。图5-3所示:
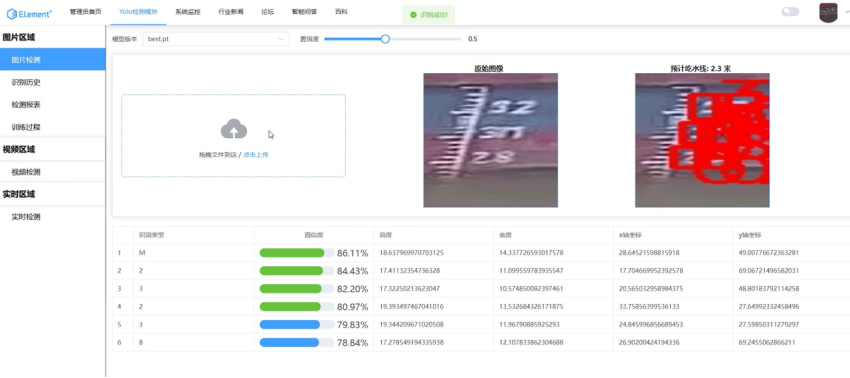
图5-3 yolo检测模块

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)