欧拉角与ABB机器人编程
例如,Tait-Bryan角中当俯仰角β=±90°时,偏航角α和滚转角γ的旋转轴会重合(如图1所示),导致无法区分两者的贡献,出现解不唯一的情况。- 当β=90°时,第一次旋转后的X轴与原Z轴重合,此时α和γ的旋转轴均为同一方向,导致“航向”和“滚转”的控制耦合,无法独立调整。- 旋转矩阵(Rotation Matrix):用3×3矩阵表示旋转,无万向锁,但需9个参数,存储和计算成本较高。- 航空
欧拉角是描述三维空间中刚体方向的一组角度参数,通过绕不同坐标轴的旋转来表示物体的方位。它以数学家莱昂哈德·欧拉的名字命名,在机器人学、航空航天、计算机图形学等领域有广泛应用。以下是关于欧拉角的详细解析:
一、基本定义与旋转顺序
欧拉角通过三次绕坐标轴的旋转来确定刚体的方向,每次旋转围绕一个固定轴(或当前刚体的轴)进行。根据旋转轴的顺序不同,欧拉角有多种定义方式,常见的包括:
1. 经典欧拉角(Z-X-Z顺序)
分三步旋转:
- 绕世界坐标系的Z轴旋转角度α(偏航,Yaw);
- 绕新的X轴旋转角度β(俯仰,Pitch);
- 绕新的Z轴旋转角度γ(滚转,Roll)。
2. Tait-Bryan角(Z-Y-X顺序,也称为“导航欧拉角”)
航空航天中常用,对应:
- 绕Z轴旋转α(偏航);
- 绕Y轴旋转β(俯仰);
- 绕X轴旋转γ(滚转)。
注意:旋转顺序至关重要,不同顺序会导致不同的最终姿态(例如ZYX、YXZ等顺序均存在),使用时需明确约定。
二、数学表达与旋转矩阵
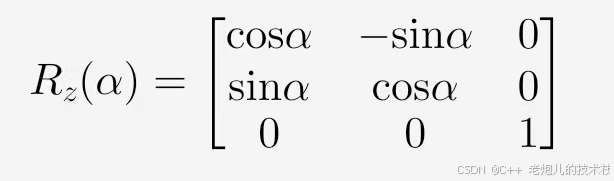
以Tait-Bryan角(Z-Y-X顺序)为例,三次旋转可分别用矩阵表示,最终旋转矩阵为三次旋转的乘积:
1. 绕Z轴旋转α
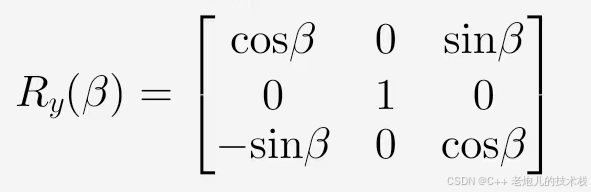
2. 绕Y轴旋转β
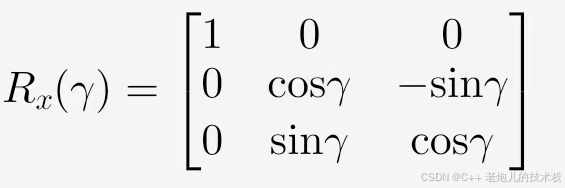
3. 绕X轴旋转γ
最终旋转矩阵:

三、应用场景
- 航空航天:描述飞行器的偏航(Yaw,航向变化)、俯仰(Pitch,抬头/低头)、滚转(Roll,机翼倾斜)。
- 机器人学:表示机械臂末端执行器的姿态,或移动机器人的朝向。
- 计算机图形学:控制3D模型的旋转,直观实现用户交互操作。
- 运动捕捉:分析人体关节的旋转角度(如髋关节、肩关节等)。
四、优缺点
- 优点:
1. 直观易懂,符合人类对旋转的直觉(如“先转多少度,再转多少度”)。
2. 仅用三个参数即可表示三维姿态,参数少、计算简洁。
- 缺点:
1. 万向锁(Gimbal Lock)问题:当两次旋转轴重合时,会丢失一个自由度。例如,Tait-Bryan角中当俯仰角β=±90°时,偏航角α和滚转角γ的旋转轴会重合(如图1所示),导致无法区分两者的贡献,出现解不唯一的情况。
2. 角度插值不连续:直接对欧拉角做线性插值会导致旋转路径不光滑,需通过四元数等方法优化。
五、万向锁的示例与本质
以Tait-Bryan角为例,当俯仰角β=90°时:
- 原偏航角α绕Z轴旋转,滚转角γ绕X轴旋转;
- 当β=90°时,第一次旋转后的X轴与原Z轴重合,此时α和γ的旋转轴均为同一方向,导致“航向”和“滚转”的控制耦合,无法独立调整。
六、替代方案
- 四元数(Quaternion):用四个参数表示旋转,无万向锁问题,插值平滑,广泛用于计算机图形学和机器人控制。
- 旋转矩阵(Rotation Matrix):用3×3矩阵表示旋转,无万向锁,但需9个参数,存储和计算成本较高。
总结
欧拉角是描述三维旋转的基础工具,其直观性使其在工程中被广泛使用,但万向锁问题限制了其在高精度连续控制场景中的应用。实际应用中,常根据需求结合四元数或旋转矩阵来弥补欧拉角的不足。理解欧拉角的旋转顺序和万向锁机制,是掌握三维姿态表示的关键。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)