登录社区云,与社区用户共同成长
邀请您加入社区
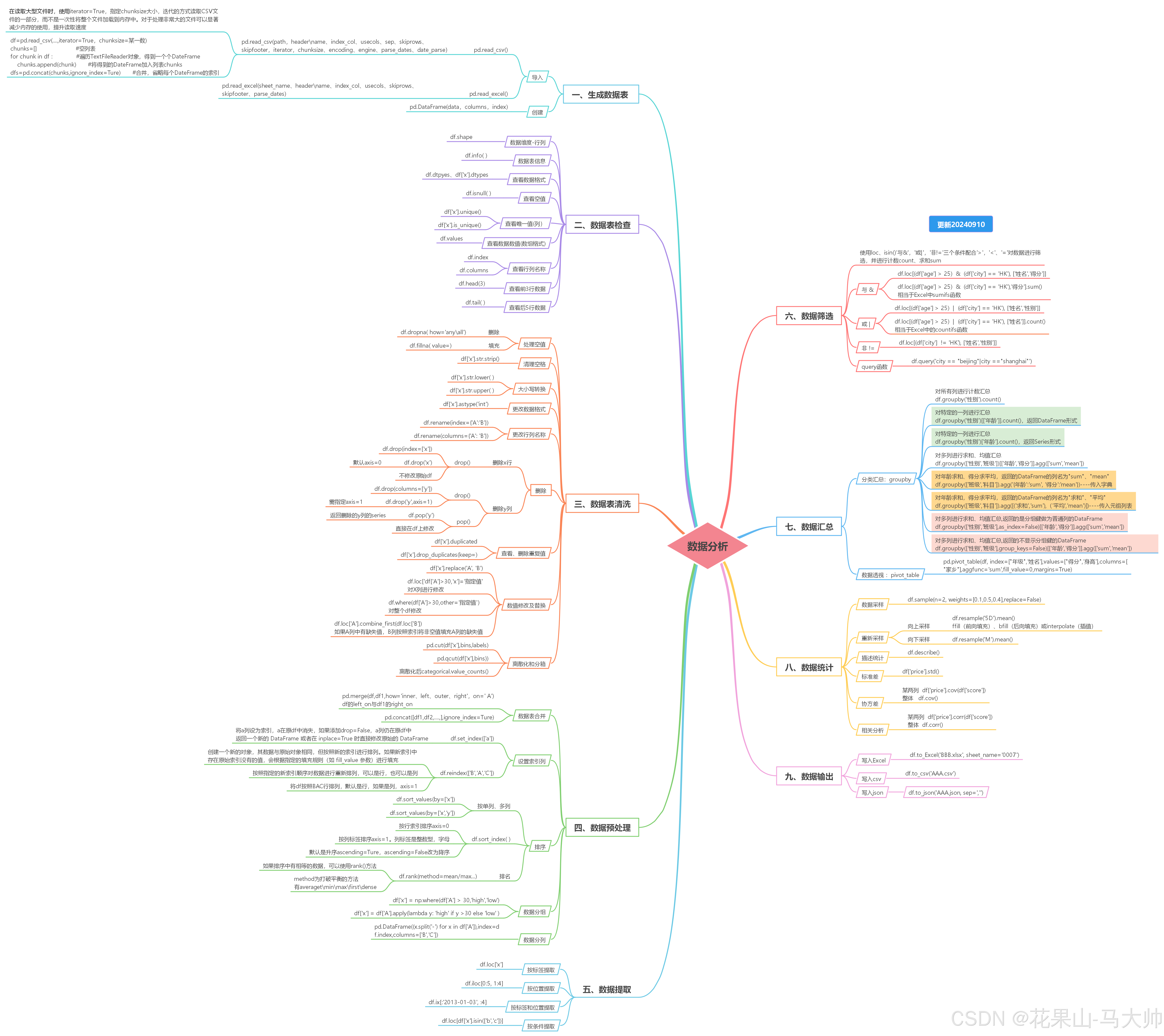
学习笔记——pandas数据分析思维导图。
更新:20240910
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
从企业展厅到服务机器人:国产大模型 × 魔珐星云的具身交互落地验证
【AI】魔珐星云 SDK 实战测评:Cursor、Copilot、通义灵码如何走向具身交互成品
从纯文本 Agent 到具身交互智能:魔珐星云让大模型拥有 3D 拟人化表达层
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动









 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)