登录社区云,与社区用户共同成长
邀请您加入社区
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
2026-01-26:可以被机器人摧毁的最大墙壁数目。用go语言,在一条无限延伸的直线上,分布着若干机器人和若干堵墙。给定三个整数数组:表示机器人位置的 robots、表示每个机器人射程的 dista
f0f1: 动态规划状态变量,表示到当前机器人为止,采用不同射击策略能摧毁的最大墙数。leftcurright0right1: 双指针,用于快速定位墙数组中满足特定条件的区间。初始化这些指针都为0,表示从墙数组的起始位置开始扫描。
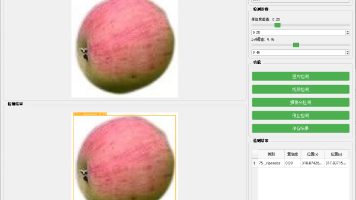
基于深度学习YOLOv10的苹果成熟度检测系统(YOLOv10+YOLO数据集+UI界面+Python项目源码+模型)
宇树 Go2 + NaVILA 全栈导航系统详解 (新手入门版)
本文详细介绍了宇树Go2机器人搭配NaVILA全栈导航系统的技术架构与实现方案。系统采用分层设计,包含仿真环境(Go2描述与Gazebo模拟)、底层控制(quadropted_controller)、导航定位(Nav2+Cartographer)和核心VLA(视觉语言动作)模块。重点对比了官方NaVILA方案(依赖高性能GPU)与优化后的轻量化方案(基于llama.cpp的Client-Serve
扫一扫分享内容






 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)