开源的机器人界面
HMI开源工程
·
人机界面
一 概述
在前面的文章里面,已经介绍了一种R型控制器的接口指令,在本篇中,将介绍一种使用这个指令集的界面,并且开源给大家,方便开发各自的控制器界面。
二 界面布局
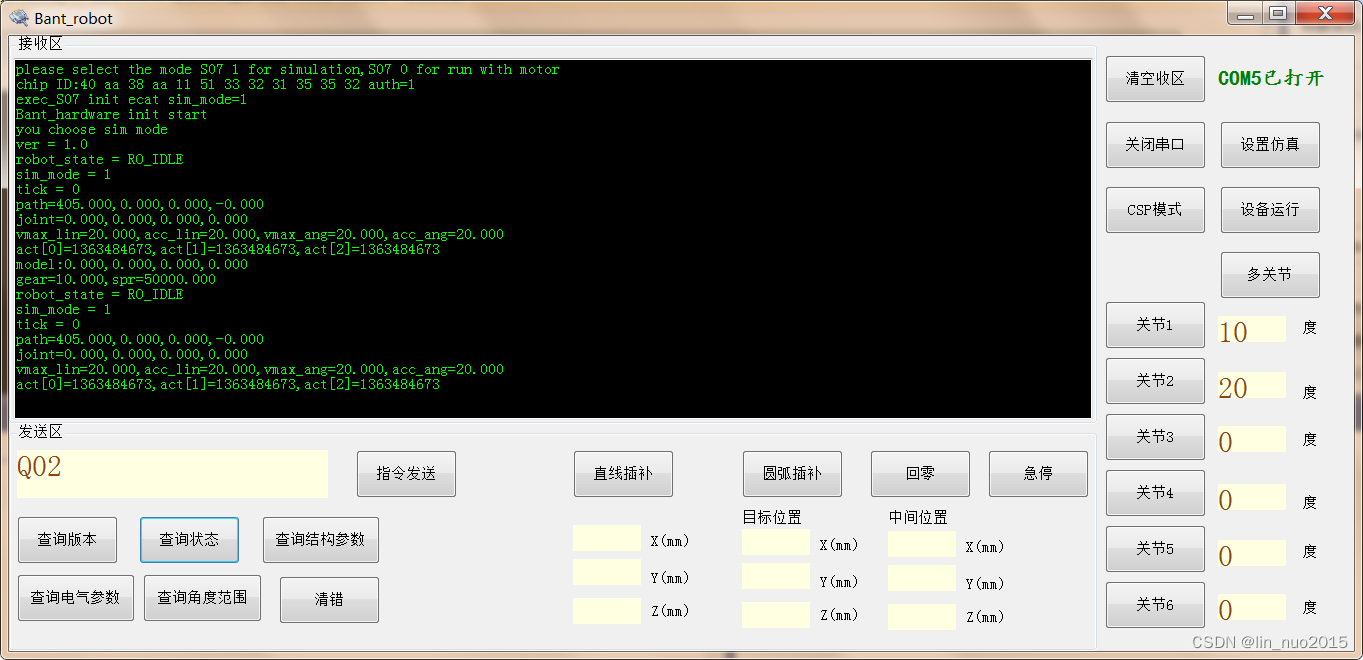
图1 R型机器人控制界面
该界面用C#开发,主要分为数据显示区,控制区以及数据输入区三大部分。左上角是显示区,这里展示的是控制器发送上来的信息。正下发有个发送字符串输入框,可以使用任何之前讲解过的接口指令。其余按钮实际上都是对各种指令的封装,从源码中也可以看出来。为了方便大家使用,专门对关节控制和直线插补,圆弧插补做了按钮和数据输入框。
三 使用流程
- 打开串口
默认使用COM5,大家可以自己绑定机器上的端口
- 设置仿真
这里可以使用仿真或者实际设备运行
- CSP模式
进入这个模式以后,就可以开始实际运行了,当然,运动之前可以查询各类参数是否正常
- 运行单个关节
输入角度值,然后点击对应的按钮就能完成关节运动
- 多关节
可以让各个关节同步运行到所需位置
- 直线插补或者圆弧插补
- 回零
大家可以自己运行一下,感受下控制器的功能
如果需要这个界面的源码工程,请联系作者获取。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)