Robotiq 2F-85夹爪在UR机器人上的可视化资源包
在现代工业自动化领域,机械手夹爪作为一种关键组件,其性能和适用性对于机器人的灵活操作至关重要。Robotiq 2F-85机械手夹爪就是这一领域中的佼佼者,它以其卓越的适应性和兼容性,被广泛应用于各种工业场景。宏定义是Xacro的核心特性之一。它们不仅有助于简化代码,而且可以使用参数化的方式来创建可配置的机器人模型。这意味着,通过更改宏的参数,可以很容易地调整机器人组件的尺寸和属性,而无需深入复杂的

简介:这个压缩包包含Robotiq公司的2F-85型机械手夹爪的可视化资源,它是一款适用于工业自动化的灵活且强大的夹爪。资源包中包含的URDF和Xacro文件允许开发者在ROS系统中描述和控制机器人,而DAE格式的3D模型则可以用于模拟和可视化。这些资源对于需要集成Robotiq 2F-85夹爪到UR协作机器人进行工作空间规划、视觉验证和路径规划的用户来说尤为有用。 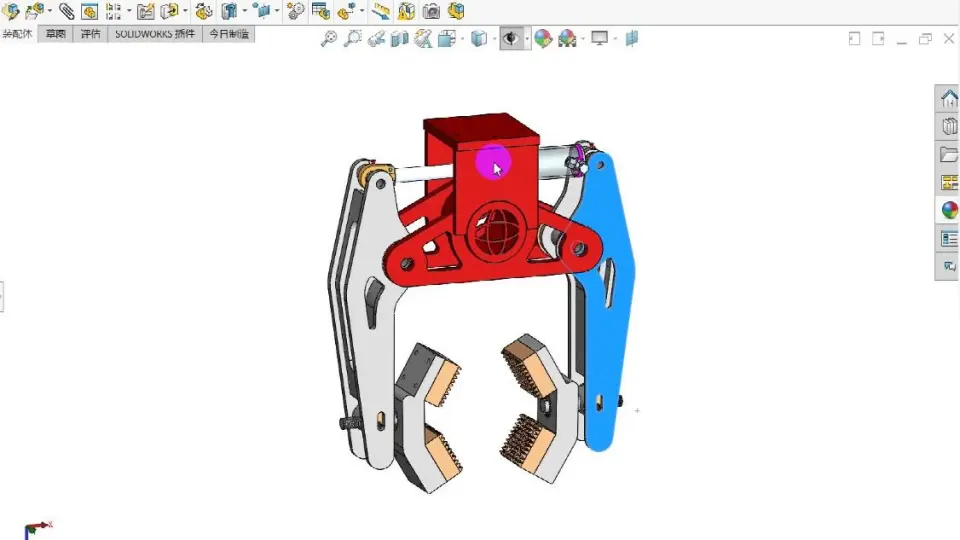
1. Robotiq 2F-85机械手夹爪介绍
在现代工业自动化领域,机械手夹爪作为一种关键组件,其性能和适用性对于机器人的灵活操作至关重要。 Robotiq 2F-85机械手夹爪 就是这一领域中的佼佼者,它以其卓越的适应性和兼容性,被广泛应用于各种工业场景。
1.1 设计与功能特点
Robotiq 2F-85夹爪拥有轻质铝合金结构,结合高精度传感器,确保了在狭小空间内也能进行精确的抓取和放置操作。它支持力控制和位置控制,能够在不确定性和动态环境中保持稳定的工作性能。
1.2 应用领域
这款夹爪尤其适用于电子产品装配、包装、搬运和组装等任务。它的应用不仅限于工业自动化,还扩展至实验室自动化、医疗器械等领域,为各种操作提供了灵活性和可靠性。
1.3 技术参数解读
Robotiq 2F-85夹爪的技术参数包括其最大夹持力、重量、速度和行程等。这些参数为选择和配置合适的夹爪提供了关键信息,确保机械手能在预定条件下高效运行。
在接下来的章节中,我们将深入探讨Robotiq 2F-85夹爪与UR机械臂的兼容性、URDF文件在ROS中的应用、Xacro文件的高级功能等话题,进一步展示如何在机器人技术中更有效地应用这些工具和协议。
2. UR机械臂夹爪兼容性研究
2.1 UR机械臂与Robotiq 2F-85夹爪的接口分析
2.1.1 机械接口匹配与适配问题
在机器人系统集成过程中,机械接口的匹配是确保夹爪可以正确安装并功能正常的关键步骤。UR机械臂广泛使用的是一种模块化的快换系统,这为Robotiq 2F-85夹爪提供了方便快捷的连接方式。机械接口的适配包括夹爪安装座与UR机械臂末端执行器的对准和紧固。
UR机械臂末端执行器通常具备不同的法兰盘尺寸,以适应不同的夹具。在适配Robotiq 2F-85夹爪时,需要考虑其与法兰盘的尺寸兼容性。例如,标准法兰盘直径为50mm,而Robotiq 2F-85夹爪需通过特定适配器才能与之匹配。
在适配过程中,我们需要注意以下几点:
- 法兰盘的安装孔位置与夹爪安装座的孔位是否一致。
- 是否需要使用转接件或适配器来实现接口之间的对接。
- 夹爪安装后的牢固程度以及是否影响到机械臂的运动精度。
针对上述问题,可以通过以下步骤进行适配:
- 确认UR机械臂末端执行器的法兰盘尺寸。
- 选择合适的Robotiq 2F-85夹爪安装座,或确定是否需要额外的适配器。
- 安装夹爪并进行初步测试,检查安装的稳固性和运动范围。
- 如有必要,微调夹爪安装位置以确保最佳性能。
适配过程应由具有相关经验的工程师来完成,以确保夹爪安装正确无误,避免因安装不当导致的设备损坏或安全风险。
2.1.2 电气接口分析与接线方案
电气接口的分析是关于UR机械臂与Robotiq 2F-85夹爪之间的电气信号与电源连接。在进行电气接口分析时,首要任务是理解两个设备间的接口标准和信号协议。Robotiq 2F-85夹爪通常采用标准的电气接口,并通过专用电缆与控制器相连,而UR机械臂支持多种接口,例如IO输入输出接口、以太网接口等。
UR机械臂与Robotiq 2F-85夹爪的电气接口主要涉及:
- 夹爪控制器与机械臂主控制器之间的信号传输。
- 电源线的连接,确保夹爪可以正常运作。
对于电气接口的接线方案,这里需要考虑以下因素:
- 确认夹爪的电源和信号线规格,包括电压、电流以及控制信号类型。
- 确保机械臂主控制器的输出接口与夹爪控制器的输入匹配。
- 考虑电缆长度是否足够,以及是否需要抗干扰措施。
在实际接线时,通常按照以下步骤:
- 根据技术手册,了解UR机械臂和Robotiq 2F-85夹爪的电气接口参数。
- 准备相应的电缆和连接器,根据需要可能还需接线端子和接插件。
- 断开电源,将夹爪控制器的电源和信号线接入机械臂控制器的对应端口。
- 完成接线后,进行电气连接的安全性和功能性检查。
- 在机械臂的用户界面中设置相应的输入输出端口参数。
通过上述步骤,可以确保UR机械臂与Robotiq 2F-85夹爪之间的电气接口无误,从而实现稳定的通信和电力供应。这为整个机器人的稳定运行提供了重要保障。
3. URDF文件在ROS中的应用
3.1 URDF文件的基础理论与结构解析
3.1.1 URDF文件的XML格式与规范
统一机器人描述格式(URDF)文件是用于描述机器人模型的XML格式文件。它是ROS中用来表示机器人的主要方式,通过URDF文件,我们可以构建机器人模型的几何和动力学描述。URDF文件必须遵守XML的语法规则,这意味着标签必须正确闭合,属性的定义也必须遵循一定的规范。
在URDF文件中, 标签是模型的根元素,包含了整个机器人的描述信息。机器人的每个关节(joint)和链接(link)都被定义为一个独立的元素,并通过 和 /> 标签表示。关节表示了两个链接之间的运动关系,链接则代表了机器人的物理结构部分,例如机械臂的臂节、夹爪等。
URDF文件中还常常涉及到惯性属性的定义,使用 标签表示一个链接的质量分布。此外,视觉和碰撞属性也在URDF中通过 和 标签进行定义,用于机器人仿真及物理模拟。
3.1.2 URDF文件的模型描述与参数设置
当创建URDF模型时,需要对每个链接的几何形状进行描述,常见的形状包括立方体、球体、圆柱体和网格(mesh)。通过 标签,我们可以指定链接的形状及其尺寸。例如,立方体使用 标签,球体使用 标签,而网格则使用 标签。
参数设置在URDF中同样至关重要,它不仅包括了物理属性如质量、惯性,还包含了关节的限制、运动范围和动力学参数等。例如,对于转动关节(revolute joint),其限制可以用 标签中的 和 属性来定义其运动角度范围。
此外,URDF文件允许我们使用命名空间(namespace)和 标签来引用其他URDF文件,这极大地增强了文件的模块化和可重用性。在大型机器人系统中,将每个组件(如传感器、驱动器)定义为单独的URDF模块,然后通过 标签引入到主机器人描述中是一种常见的实践。
<robot name="my_robot">
<link name="base_link">
<visual>
<geometry>
<box size="1.0 1.0 0.1" />
</geometry>
</visual>
</link>
<link name="gripper">
<visual>
<geometry>
<mesh filename="package://my_robot_description/meshes/gripper.dae" />
</geometry>
</visual>
</link>
<joint name="base_to_gripper" type="fixed">
<parent link="base_link" />
<child link="gripper" />
<origin xyz="0 0 0.1" />
</joint>
</robot>
在上面的URDF片段中,我们定义了两个链接(base_link和gripper),以及一个固定类型的关节(base_to_gripper),将它们连接起来。链接的可视化部分被设置为一个盒子和一个从文件导入的网格模型。
3.2 URDF文件在ROS中的实际应用
3.2.1 ROS环境下的URDF文件使用
在ROS环境中,URDF文件通常与xacro文件一起使用,xacro是URDF的扩展,提供了宏定义、数学运算等强大功能,使得复杂的机器人模型能够更加简洁和易于维护。xacro文件最终会转换成URDF文件,因为ROS的许多工具(如rviz、moveit)都直接使用URDF格式。
要使用URDF文件在ROS中,首先需要将其放置在ROS包的urdf子目录下,然后在包的CMakeLists.txt文件中设置install(或ament_package,对于ROS2)指令以安装URDF文件,使其在ROS的运行时环境中可用。
下面是一个简化的例子,展示了如何在ROS包中使用URDF文件:
- 将URDF文件(例如my_robot.urdf)放置于my_robot_description包的urdf子目录。
- 在CMakeLists.txt文件中添加如下指令以安装URDF文件:
install(
DIRECTORY urdf
DESTINATION share/${PROJECT_NAME}
)
- 使用urdfdom和xacro的ROS包,例如在你的ROS节点中:
import rospy
from urdf_parser_py.urdf import URDF
# 初始化ROS节点
rospy.init_node('example_node')
# 从urdf文件创建URDF对象
urdf = URDF.from_parameter_server()
# 使用urdf对象进行后续操作
# ...
3.2.2 URDF与ROS节点的集成与仿真
在ROS中,URDF文件可以通过robot_state_publisher节点集成到ROS系统中。该节点订阅机器人状态信息,并发布到tf(坐标变换)话题上,这样,ROS中的其他节点可以获取到机器人各部分之间的相对位置和姿态。
为了进行仿真,可以使用Gazebo仿真工具。在Gazebo中启动仿真前,需要将URDF模型转换为SDF(可扩展机器人描述格式),因为Gazebo原生支持SDF格式。这个转换可以通过xacro工具和一些额外的xacro定义来完成。
集成URDF模型到ROS节点的过程,使得机器人模型的物理和视觉仿真变得可行。使用rviz可视化工具,可以查看和监控机器人的三维模型以及各个关节和链接的状态。此外,也可以利用moveit!这样的插件进行路径规划和运动学分析。
下面是集成URDF模型到Gazebo的代码示例:
<?xml version="1.0" ?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find my_robot_description)/urdf/my_robot.xacro"/>
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/my_robot</robotNamespace>
</plugin>
</gazebo>
</robot>
在此示例中,通过gazebo标签嵌入了自定义的URDF文件,并设置了插件以支持ROS控制框架。这样,URDF模型就能在Gazebo中被正确加载和控制。
请注意,以上提及的代码块仅作示意,实际应用中可能需要根据具体ROS版本和安装的包进行相应的调整。
4. Xacro文件的ROS功能
4.1 Xacro文件的原理与优势
4.1.1 Xacro文件对URDF的扩展
Xacro(XML Macros)是一种通过宏定义和数学表达式扩展URDF(Unified Robot Description Format)功能的标记语言。它允许我们创建更加简洁和可维护的机器人描述文件,解决了URDF在实际使用过程中遇到的一些限制。
在没有Xacro的情况下,URDF文件的维护可能会变得复杂,特别是在处理具有许多相同参数的多个相同类型的组件时。这不仅使文件变得冗长,而且在需要进行全局更改时需要修改多个地方,这很容易导致错误。
Xacro通过引入宏和数学运算来缓解这个问题。例如,宏可以用来重复引用相同的参数,而数学表达式可以用来计算复杂的几何关系。使用Xacro,相同的值可以定义一次,并且可以在需要时引用,这大大提高了代码的复用性和可读性。
下面是一个简单的Xacro文件例子,展示了如何定义一个宏来简化重复的长度单位定义:
<xacro:macro name="inch2meter" params="in">
<xacro:property name="value" value="${in * 0.0254}" />
</xacro:macro>
在这个例子中,我们定义了一个名为 inch2meter 的宏,它接受一个参数 in ,并计算其以米为单位的等价值。在Xacro文件的任何地方,我们可以通过以下方式使用这个宏来定义长度:
<link name="my_link">
<visual>
<geometry>
<box size="${inch2meter(2)} 1 1" />
</geometry>
...
</visual>
</link>
此链接的视觉描述部分使用 inch2meter(2) 来指定一个2英寸的盒子大小,该值会被替换为0.0508米。
4.1.2 Xacro与宏定义在模型简化中的作用
宏定义是Xacro的核心特性之一。它们不仅有助于简化代码,而且可以使用参数化的方式来创建可配置的机器人模型。这意味着,通过更改宏的参数,可以很容易地调整机器人组件的尺寸和属性,而无需深入复杂的XML结构。
例如,考虑一个具有多个轮子的移动机器人。每个轮子都可以通过一个宏来描述其尺寸和位置。如果宏被设计为接受半径、宽度和安装位置作为参数,那么通过简单地更改这些参数的值,就可以轻松创建不同大小的轮子。
下面是一个使用宏来定义轮子组件的Xacro示例:
<xacro:macro name="wheel" params="radius width pose">
<link name="wheel_link">
<visual>
<geometry>
<cylinder radius="${radius}" length="${width}" />
</geometry>
...
</visual>
<collision>
<geometry>
<cylinder radius="${radius}" length="${width}" />
</geometry>
...
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="1.0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0" />
</inertial>
<joint name="wheel_joint" type="continuous">
<parent link="base_link" />
<child link="wheel_link" />
<axis xyz="0 1 0" />
<origin xyz="${pose}" />
</joint>
</link>
</xacro:macro>
在这个宏中,我们定义了一个名为 wheel 的宏,它接受 radius (半径)、 width (宽度)和 pose (位置)作为参数。这个宏会创建一个轮子的链接、视觉和碰撞几何体以及惯性属性,并定义了一个关节来连接轮子到机器人的基座。
通过调用 <xacro:wheel> 并传递适当参数的方式,可以生成多个具有不同特性的轮子,大大简化了整个机器人的描述过程。这在需要快速更改设计或批量处理类似组件时尤其有用。
4.2 Xacro文件的高级应用
4.2.1 参数化设计与动态配置
参数化设计是现代机器人模型中非常流行的概念。它允许设计者在保持整个模型一致性的同时,通过修改参数来改变模型的特定特征。Xacro文件支持参数化设计,并且能够提供一个动态配置环境,这对于开发高度可定制的机器人系统非常有价值。
通过Xacro实现参数化设计的关键在于使用 <xacro:property> 标签定义参数。这些参数随后可以在Xacro文件的任何位置通过 ${} 语法进行引用。这意味着,如果想要修改整个机器人的尺寸或行为,只需更改参数值即可。
参数可以是任何类型的值,包括数字、布尔值、字符串和复杂的表达式。它们不仅可以定义几何尺寸,如长度、宽度和高度,还可以用来设置物理属性,如质量、惯性和摩擦系数等。
在下面的Xacro文件示例中,我们将定义几个参数来控制机器人的基本属性:
<xacro:property name="robot_mass" value="10.0" />
<xacro:property name="wheel_radius" value="0.1" />
<xacro:property name="robot_length" value="0.5" />
通过设置这些参数,你可以快速地调整机器人的质量、轮子半径和总体长度。这些参数在文件的任何位置都可以被引用,从而实现对整个机器人的参数化控制。
4.2.2 Xacro文件在ROS中的实际操作案例
在ROS(Robot Operating System)中,Xacro文件通常与URDF文件一起使用,来描述机器人模型。ROS社区广泛接受Xacro作为模型定义的首选方法,因为它能够提供更加灵活和高效的模型描述。
一个Xacro文件在ROS中实际操作案例会涉及以下几个步骤:
- 创建Xacro文件并定义机器人模型的参数。
- 使用参数和宏来构建机器人的各个组件。
- 在ROS中加载Xacro文件,并使用
rosrun xacro xacro命令进行处理,从而生成一个URDF文件。 - 将生成的URDF文件加载到ROS的机器人状态发布器(robot_state_publisher)中,以便用于仿真和实际的机器人控制。
下面是一个简单的ROS启动文件示例,该文件加载Xacro文件并启动机器人模型的仿真:
<launch>
<arg name="model" default="$(find my_robot_description)/urdf/my_robot.xacro" />
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz"/>
</launch>
在这个例子中, <arg> 标签定义了一个名为 model 的参数,其默认值是Xacro文件的位置。 <param> 标签使用 xacro 命令将Xacro文件处理成URDF格式,并通过 robot_description 参数将其传递给 robot_state_publisher 节点。之后,启动 joint_state_publisher 和 rviz 节点用于关节状态的发布和3D可视化。
通过这个实际操作案例,我们可以看到Xacro在ROS中的实际应用,它极大地简化了机器人的模型描述和仿真过程,提供了一种高效且易于维护的方式来处理复杂的机器人描述。
5. DAE格式3D模型应用
5.1 DAE模型文件格式的解析与特点
5.1.1 DAE格式的结构与转换方法
数字资产交换格式(DAE),也称为 COLLADA,是一个由Khronos Group维护的开放标准文件格式,它允许3D软件包之间交换模型和场景。DAE格式广泛用于游戏开发、可视化和机器人技术中,因为它支持复杂的场景和动画。
DAE文件的结构基于XML,并包含以下主要部分:
- asset : 包含文件元数据,如创建工具和时间戳。
- library_images : 定义纹理图集。
- library_materials : 包含与纹理图集相关联的材质信息。
- library_effects : 定义渲染效果。
- library_geometries : 包含顶点、面、网格和其他几何信息。
- library_controllers : 包含影响几何体的控制器,例如骨骼动画或变形器。
- scene : 定义场景图,它组织所有的资源,形成最终的场景。
转换方法
将3D模型转换为DAE格式可使用多种工具,例如Blender、Maya、3ds Max等。以Blender为例:
- 在Blender中打开你的3D模型。
- 选择
File > Export > Collada (.dae)。 - 在弹出的导出窗口中,选择需要导出的内容,例如几何体、材质、动画等。
- 指定导出路径并命名文件,点击
Export DAEPython。 - 完成后,DAE文件就包含了所有选定的元素,可以在其他支持DAE格式的软件中打开和使用。
5.1.2 DAE在3D建模软件中的支持情况
多数主流3D建模软件都支持DAE格式的导入和导出。这是因为DAE格式的开放性和通用性,使得它成为交换3D数据的理想选择。支持情况可以具体如下:
- Blender : 完全支持DAE格式的导入和导出。
- Autodesk Maya : 支持DAE格式的导入和导出,特别是对于动画和几何体。
- 3ds Max : 支持DAE格式的导入,但导出能力有限,特别是对于某些复杂的场景。
- SketchUp : 通过插件支持DAE格式。
- Cinema 4D : 支持DAE格式的导入和导出,但可能需要额外的插件。
在实际工作中,用户需要根据自己所使用的软件选择合适的转换路径,确保DAE文件在目标软件中能够正确地导入和渲染。
5.2 DAE模型在机器人技术中的应用
5.2.1 DAE模型导入与导出技巧
在机器人技术领域,精确的3D模型对设计、模拟和路径规划至关重要。DAE模型在机器人技术中的应用需要一定的导入与导出技巧,以确保模型质量与兼容性。
导入技巧 :
- 检查模型单位 : 确保模型在转换前后的单位保持一致,比如是否使用米作为单位。
- 清理模型 : 在导出前,清理模型中不必要的元素,如隐藏的几何体或历史堆栈。
- 测试导入 : 在不同的软件中测试导入DAE模型,确保所有需要的元素都被正确加载。
导出技巧 :
- 保留材质和纹理 : 导出DAE模型时,确保选择保留材质和纹理信息,以便在导入时能够保留原始外观。
- 使用命名规范 : 为模型中的元素采用一致和描述性的命名规范,便于在导入后识别和管理。
- 处理大型模型 : 对于大型复杂的模型,考虑使用批处理或者拆分模型来简化导入过程。
5.2.2 在ROS中使用DAE模型进行可视化
在ROS(Robot Operating System)环境中,DAE模型用于可视化非常常见。这可以通过rviz工具实现,rviz是ROS中一个强大的可视化工具,支持多种格式的模型文件。
在ROS中使用DAE模型的步骤 :
- 安装DAE插件 :确保你的ROS安装了
collada_urdf和urdf_parser_plugin,这些插件可以处理DAE文件。 - 创建URDF模型 :使用DAE文件创建URDF模型。URDF(Unified Robot Description Format)是ROS中描述机器人模型的标准格式。
- 导出URDF :将URDF模型与DAE文件关联,确保URDF文件能够指向正确的DAE文件路径。
- 使用rviz查看模型 :在ROS中运行rviz,添加RobotModel,并指向你的URDF文件。rviz会加载并显示3D模型。
以下是一个简单的URDF模型定义示例,展示了如何在URDF中引用DAE模型文件:
<robot name="my_robot">
<link name="my_link">
<visual>
<geometry>
<mesh filename="package://my_package/models/my_model.dae" />
</geometry>
</visual>
</link>
</robot>
在此示例中, my_model.dae 是3D建模软件导出的DAE文件,该文件存放在ROS的包 my_package 的 models 文件夹中。通过上述步骤,你可以在ROS中轻松查看使用DAE模型的机器人模型。
6. 3D建模与机器人技术结合
随着技术的发展,3D建模技术与机器人技术的结合变得日益紧密,成为推动现代工业自动化和智能化的重要力量。3D建模不仅提高了机器人的设计效率,而且极大地增强了机器人在复杂环境中的适应性和精确性。本章将探讨3D建模技术在机器人领域的应用概况,并通过实践案例展示如何将3D建模与机器人技术进行有机结合。
6.1 3D建模技术在机器人领域的应用概况
6.1.1 3D建模在机器人设计中的作用
在机器人设计阶段,3D建模技术允许设计师以三维形式构建机器人模型,并对各个组件进行精确的设计与仿真。设计师能够使用3D建模软件来模拟机械结构、运动学、动力学和碰撞检测等,这有助于在实际制造之前发现设计中的潜在问题。此外,3D模型能够用于创建详细的工程图纸和装配指南,提升生产效率。
6.1.2 机器人仿真与设计软件综述
市场上存在多种机器人设计与仿真软件,例如SolidWorks, CATIA, ROS (Robot Operating System)集成的Gazebo等。这些软件提供了强大的建模、仿真和分析功能,可以模拟实际工作环境中的机器人行为。通过仿真软件,可以在虚拟环境中测试机器人的运动性能,评估设计的有效性,并对控制策略进行优化。
6.2 机器人技术结合3D建模的实践案例
6.2.1 设计、制造、测试一体化流程
3D建模与机器人技术结合的实践案例之一是设计、制造、测试的一体化流程。以机器人夹爪的设计为例,设计师首先使用3D建模软件设计夹爪的基本结构和关键参数,然后通过仿真软件测试夹爪的运动范围和承载能力。之后,利用3D打印技术快速制造出夹爪原型,进行实地测试。若测试结果不理想,设计师可以迅速迭代模型,并重复测试,直到达到预期性能。这一过程大大缩短了产品从设计到市场的周期,同时降低了研发成本。
6.2.2 机器人3D模型的碰撞检测与优化
另一个案例是机器人3D模型的碰撞检测与优化。在复杂的工业应用中,机器人需要与多种设备和工具协作。使用3D建模和仿真软件,如FANUC的ROBOGUIDE或ABB的RobotStudio,可以在虚拟环境中模拟机器人的实际工作路径,并执行碰撞检测。通过这种方式,可以识别潜在的机械干涉问题,并进行相应的设计调整。这确保了机器人在实际工作中的安全性和可靠性,也提高了生产的连续性和效率。
通过上述案例,我们可以看到3D建模技术与机器人技术结合的应用不仅限于制造领域,而且在机器人设计、测试和维护的各个阶段都发挥着重要作用。随着3D建模技术和机器人技术的不断发展,我们可以预见,未来这两种技术的结合将更加紧密,为工业自动化带来更多的创新和机遇。
简介:这个压缩包包含Robotiq公司的2F-85型机械手夹爪的可视化资源,它是一款适用于工业自动化的灵活且强大的夹爪。资源包中包含的URDF和Xacro文件允许开发者在ROS系统中描述和控制机器人,而DAE格式的3D模型则可以用于模拟和可视化。这些资源对于需要集成Robotiq 2F-85夹爪到UR协作机器人进行工作空间规划、视觉验证和路径规划的用户来说尤为有用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 30
30 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)