工业机器人reLTOOL坐标方向_干货分享-工业机器人常用坐标系介绍
坐标系:机器人或空间上的位置指示器系统,用于确定机器人的位置和姿态。
坐标系包含:
1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coordinate System)
4、工件坐标系(Work Object Coordinate System)
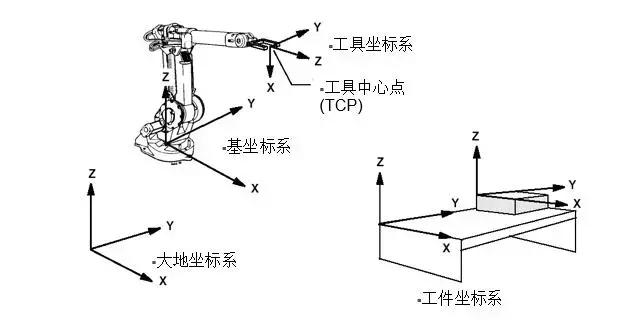
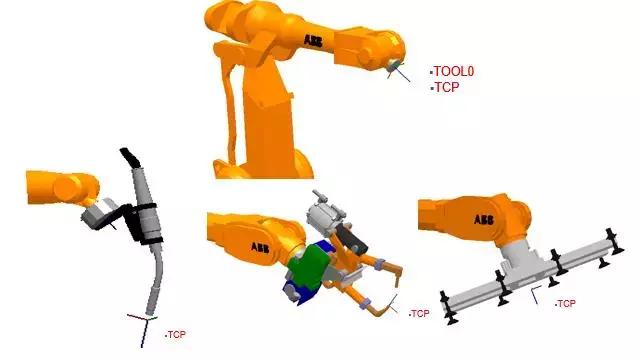
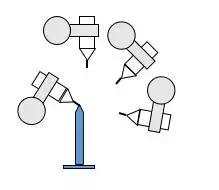
1、工具坐标系
机器人刀具坐标系由刀具中心点tcp和坐标定向两部分组成。
当机器人串联运行时,需要TCP。
1) Reorient 重定位运动(姿态运动)机器人 TCP 位置不变,机器人工具沿坐标轴旋转以改变其姿态。
2) Linear 线性运动机器人工具姿态不变,机器人TCP沿坐标轴移动。
机器人程序支持多种tcp协议,可以根据当前工作状态进行转换。
替换了robot工具,重新定义tcp后,它可以直接运行而不必更改程序。
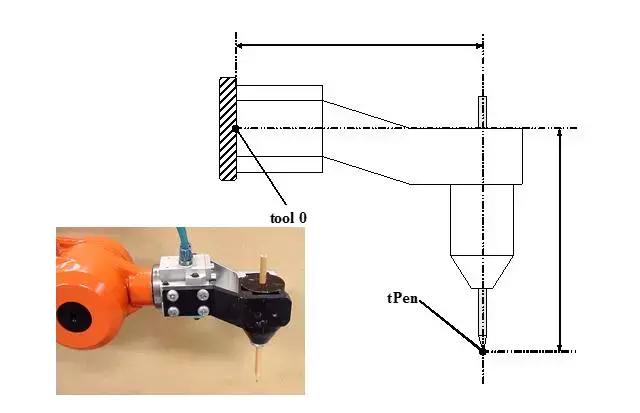
1.1.定义工具坐标系的方法:
1、N(N>=4)点法/TCP法-机器人 TCP 通过N种不同姿态同某定点相碰,得出多组解,通过计算得出当前 TCP 与机器人手腕中心点 ( tool0 ) 相应位置,座标系方向与 tool0 一致。
2、TCP&Z法-在N点法基础上,Z点和固定点之间的连接是坐标系的Z方向。
3、TCP&X,Z法-在N点法基础上,x点与不动点之间的连接是坐标系的x方向,z点与不动点之间的连接是坐标系的z方向。
2. 工件坐标系
1、机器人工件坐标系由工件原点和坐标方向组成。
2、机器人程序支持多个wobj,可以根据当前工作状态进行变换。
3、更换外部固定装置。在重新定义wobj之后,程序可以直接运行而无需更改。
4、通过重新定义wobj,您可以轻松地完成一个适用于多个机器人的程序。
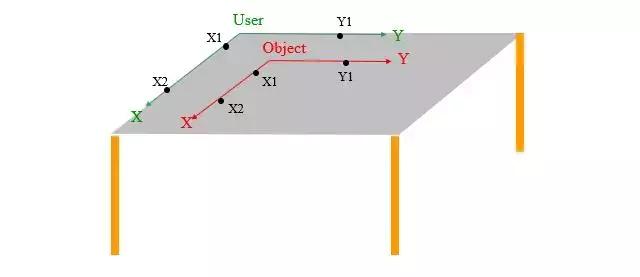
2.1.定义工件坐标系的方法:
三点法-点 X1 与 点 X2 连线组成 X 轴,通过点Y1绘制到X轴的垂直线是Y轴。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)