白泽四足机器人之——用rqt_plot工具显示mpu6050传感器数据(esp32采集imu数据通过局域网话题消息传回pc主机)
·
前言
在ROS里
rqt_plot是ROS内置的一款用于绘图的可视化插件。它可以读取话题中发布的数据,将类型允许的数据绘制成为图像。在终端中运行以下节点可打开rqt_plot:
rosrun rqt_plot rqt_plot我们可以选定话题消息的数据,可视化的显示出来,效果如下图所示。
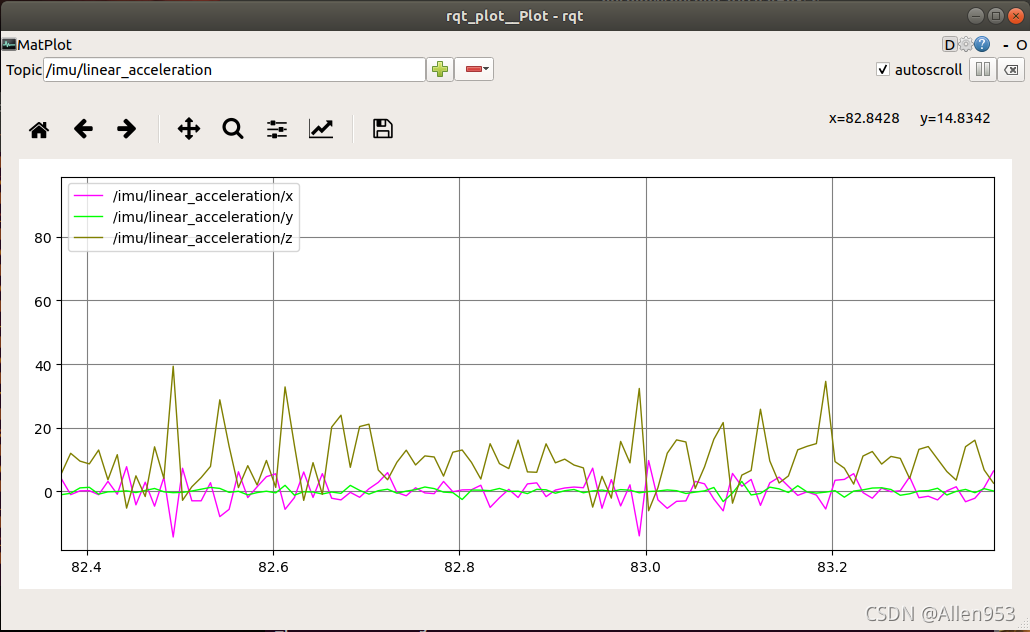
1.实体imu数据采集与显示
2.虚拟imu数据采集与显示
需要注意输入数据格式
输入值应为这个值的全路径而不能仅仅输入话题名称,例如我们想查看小乌龟的位置话题里的x坐标,在这种情况下输入值 /turtle1/pose/x is a member 是发布的话题消息"/turtle1/pose",中的一个值。
比如我们可以通过:"rostopic list"命令可以看到/imu这个话题,但是直接在输入框输入/imu是无效的,因为他有多层次的子成员。
我们可以通过:"rostopic type /imu"命令查看话题数据类型,然后通过:“rosmsg show sensor_msgs/Imu”命令可以看到消息的具体格式,如下图。
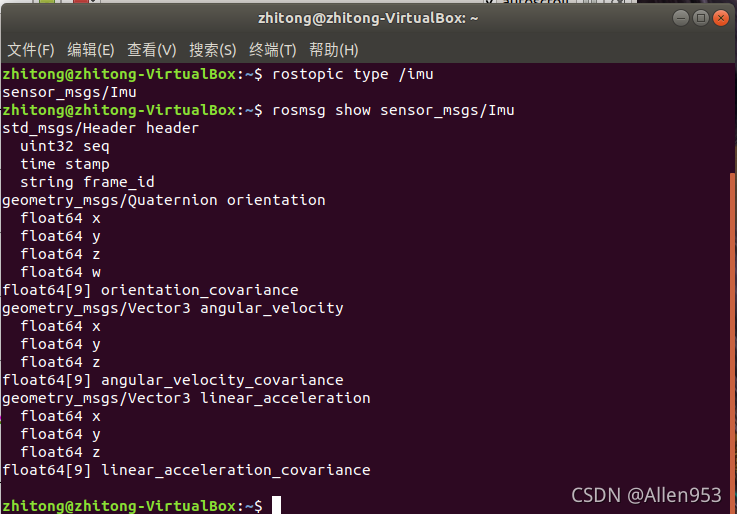
如果我们想要将话题消息数据可视化,就需要定位到具体的数据上面。
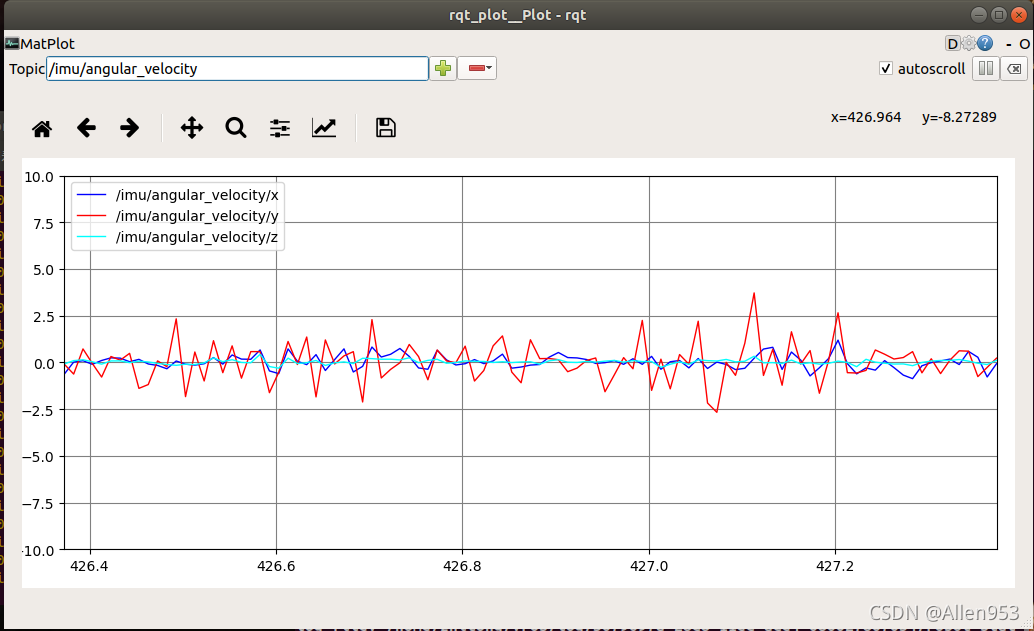
如下图输入的:/imu/angular_velocity,显示的就是IMU回传的角速度了。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)