机器人操作系统ROS2学习—控制小海龟运动
·
将Ubuntu系统和ROS2安装完成后,就可以进行调用小海龟运动了。
一、打开Ubuntu系统后,调用终端窗口。有3 种方法可以打开启动终端:
1、通过快捷键Ctr+AIt+T;
2、桌面左下角有个显示应用的菜单,点击后找到终端“Terminal”图标,打开即可;
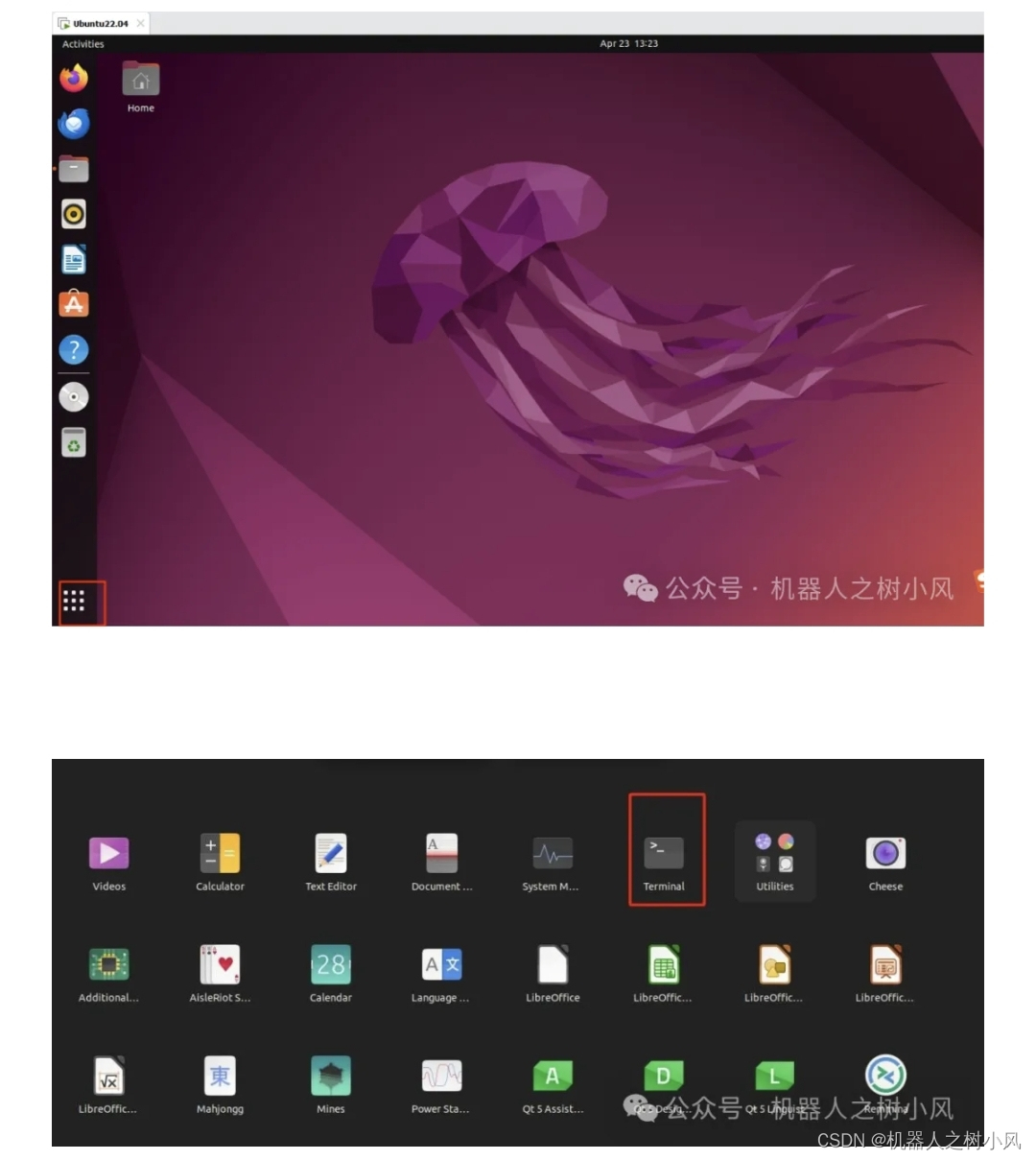
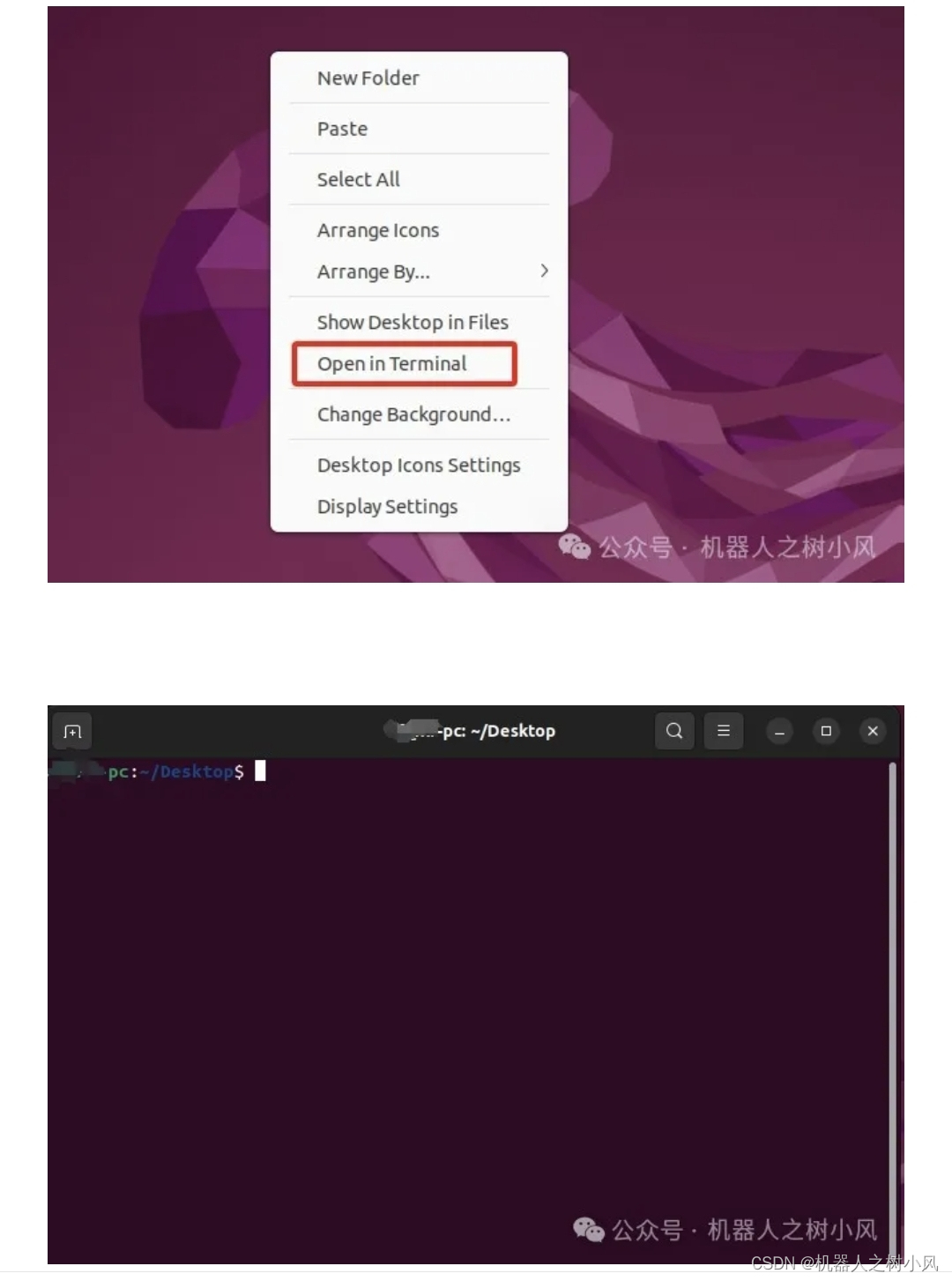
3、点击鼠标右键,选择“Open in Terminal"也能打开终端。
打开终端界面如下:
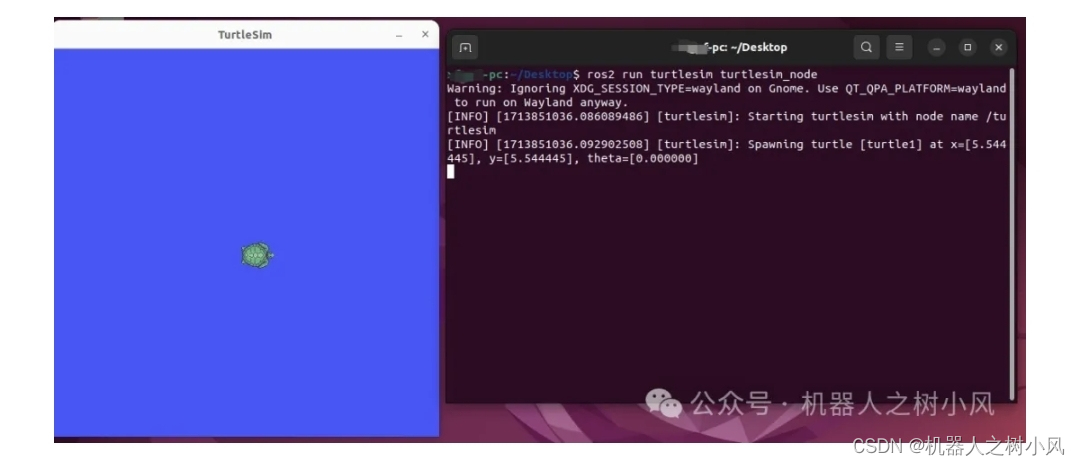
二、输入第一个指令:ros2 run turtlesim
turtlesim_node
将启动一个有蓝色背景的小海龟仿真器:
三、再打开一个终端窗口,接着输入另一个指令: ros2run turtlesim turtle_teleop_key
启动后用来通过键盘来控制小海龟的运动:
在同名公众号可以查看更多关于机器人技术。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献77条内容
已为社区贡献77条内容

所有评论(0)