【MATLAB源码-第305期】基于matlab的机器人轨迹控制仿真,采用卡尔曼滤波结合PID的控制方式。
卡尔曼滤波器通过优化估计机器人的状态,特别是速度,解决了仅有位置测量的局限性,而PID控制器则根据这些估计调整控制输入,确保机器人能够精确地达到目标位置和速度。在实际应用中,机器人通常只能直接测量位置,而不能直接测量速度,尤其是在复杂的环境中,传感器的噪声可能导致速度估计的误差增大。具体而言,系统的主要任务是模拟机器人的运动,机器人在运动过程中根据设定的目标速度进行调整,而卡尔曼滤波器则通过实时估
操作环境:
MATLAB 2022a
1、算法描述
系统概述
该系统的核心目标是通过结合卡尔曼滤波器(Kalman Filter, KF)和比例-积分-微分控制器(PID Control)来控制机器人的位置和速度。卡尔曼滤波被用于从带噪声的传感器数据中估计系统状态,而PID控制器则用于根据系统误差调节控制输入。通过这两者的配合,系统能够在动态环境中实现精准的控制,尽可能减少误差并应对传感器噪声带来的影响。
具体而言,系统的主要任务是模拟机器人的运动,机器人在运动过程中根据设定的目标速度进行调整,而卡尔曼滤波器则通过实时估计系统状态(例如位置、速度等),帮助控制器更好地响应,并保证运动过程中的精准度。PID控制器则在每次计算中根据位置误差和速度误差来调整控制输出,以达到目标。
机器人运动模型
机器人的运动可以通过物理模型来描述。一般而言,机器人可以被简化为一个由位置和速度两部分状态组成的动力学系统。机器人的位置随着速度变化,速度则受到加速度的影响。通过定义状态转移矩阵和控制输入矩阵,可以建立系统的数学模型。
在该系统中,位置与速度的变化过程可以通过二阶常微分方程来描述。机器人每个时刻的位置和速度不仅与当前状态有关,还受到控制输入(如加速度)以及系统噪声的影响。系统的测量模型通常只涉及位置,而不直接测量速度。这种情况下,卡尔曼滤波器就显得尤为重要,因为它可以在没有直接速度测量的情况下,基于位置测量来推算出速度的变化,进而估计出机器人的运动状态。
卡尔曼滤波器的角色
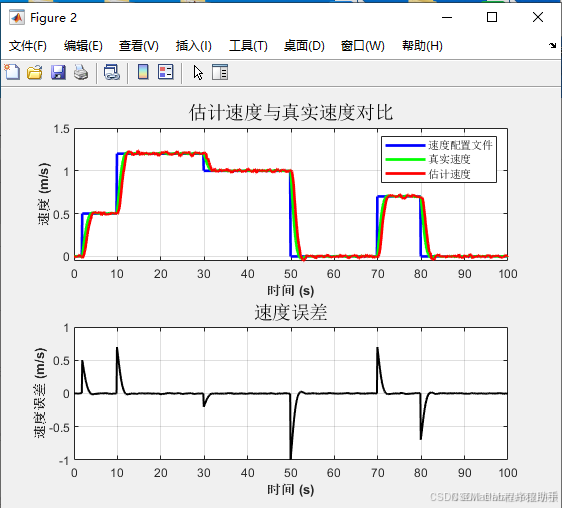
卡尔曼滤波器是一种递归算法,用于在有噪声的情况下从多个测量中估计出系统的状态。在这个系统中,卡尔曼滤波器的主要任务是估计机器人系统的速度状态。
假设机器人系统有两部分:一个是真实的系统状态(例如位置和速度),另一个是通过传感器获取的带噪声的测量值。由于测量噪声的存在,直接使用传感器数据会导致较大的误差。卡尔曼滤波器通过融合系统的动态模型和测量模型,能够提供一个最优的估计。具体地,卡尔曼滤波器利用系统的预测信息和传感器数据对速度和位置进行估计,并且在每次测量更新时,通过计算卡尔曼增益来决定如何将预测结果与实际测量结果进行结合。
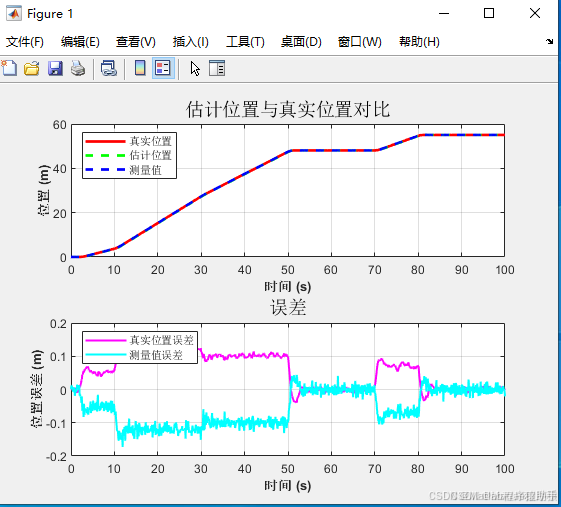
卡尔曼滤波器的输出是对系统状态的估计,通常包括位置和速度的估计。通过这种估计,系统能够获取更准确的速度信息,即便只有位置测量数据可用。这对于机器人控制至关重要,因为许多控制算法(如PID控制)需要知道机器人的速度才能有效地调节控制输入。
PID控制器的角色
PID控制器是一种经典的反馈控制算法,广泛应用于各种自动控制系统。它通过计算系统输出与期望目标之间的误差,并根据误差的大小、误差的变化速率以及误差的历史积分值来生成控制信号。PID控制器由三部分组成:
比例项(P):该项基于当前位置和目标位置之间的误差来产生控制输入,误差越大,输出控制信号也越大。
积分项(I):该项积累过去的误差,解决了比例控制可能会导致的稳态误差问题。积分项有助于消除误差的偏差,尤其在系统长期存在小的误差时非常有效。
微分项(D):该项基于误差的变化速率来调整控制信号,能够有效地抑制误差的快速变化,起到阻尼作用,减少系统的超调。
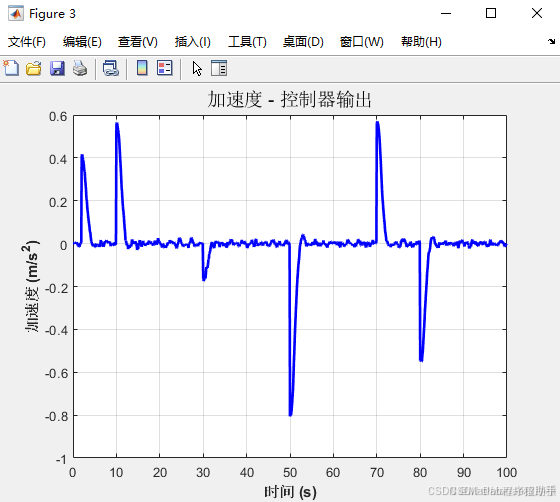
在这个机器人控制系统中,PID控制器主要用于控制机器人的加速度(即控制输入)。控制器通过计算位置误差(实际位置与目标位置之差),并结合速度误差来调节加速度,从而实现机器人的精确控制。由于卡尔曼滤波器提供了更准确的速度估计,PID控制器能够根据更精确的系统状态调整控制输入,进而提高控制精度和系统的稳定性。
系统的结合与协同工作
卡尔曼滤波器与PID控制器结合的关键在于通过卡尔曼滤波器准确估计系统状态(尤其是速度),为PID控制器提供更高质量的输入。在实际应用中,机器人通常只能直接测量位置,而不能直接测量速度,尤其是在复杂的环境中,传感器的噪声可能导致速度估计的误差增大。此时,卡尔曼滤波器通过综合考虑过程噪声和测量噪声,提供了更加准确的速度估计。
这种精确的速度估计会传递给PID控制器,控制器根据这些状态信息进行计算,输出加速度控制信号,从而调整机器人的运动状态。PID控制器的作用在于通过不断调整控制输入,使得系统状态逐步逼近目标状态,减少误差,并最终实现稳定的目标追踪。
在系统的运行过程中,卡尔曼滤波器和PID控制器是相辅相成的。卡尔曼滤波器通过优化估计提高系统对速度的感知能力,而PID控制器则根据这些信息进行控制,调整机器人的运动轨迹。两者结合起来,使得机器人在不确定的环境中能够更精确地完成任务,尤其在传感器噪声较大的情况下,系统能够有效地抑制噪声影响,提高精度和稳定性。
实际应用与优势
在实际应用中,卡尔曼滤波器与PID控制器的结合有许多优点。首先,卡尔曼滤波器能够有效地处理传感器数据中的噪声,并提供准确的状态估计,这对于需要高精度控制的机器人尤其重要。其次,PID控制器是一种简单而有效的控制算法,具有良好的抗干扰能力和调节响应能力。通过将两者结合,系统能够在动态变化的环境中实现精确的跟踪控制。
此外,卡尔曼滤波器和PID控制器的结合还能够提升系统的鲁棒性。在许多复杂的应用场景中,系统可能面临不确定性、传感器误差或者外部干扰,卡尔曼滤波器能够在噪声较大的情况下依然提供较为准确的估计,保证PID控制器的稳定运行。
总结
卡尔曼滤波算法和PID控制器的结合提供了一个强大的机器人控制解决方案。卡尔曼滤波器通过优化估计机器人的状态,特别是速度,解决了仅有位置测量的局限性,而PID控制器则根据这些估计调整控制输入,确保机器人能够精确地达到目标位置和速度。通过这种精确的控制与估计,系统能够应对不确定的环境和传感器噪声,保证机器人稳定、精准的运动表现。
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片关注公众号获取

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 10
10 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)