6.1 - UART串口数据收发环回实验
UART串口数据收发环回实验
·
1 实验任务
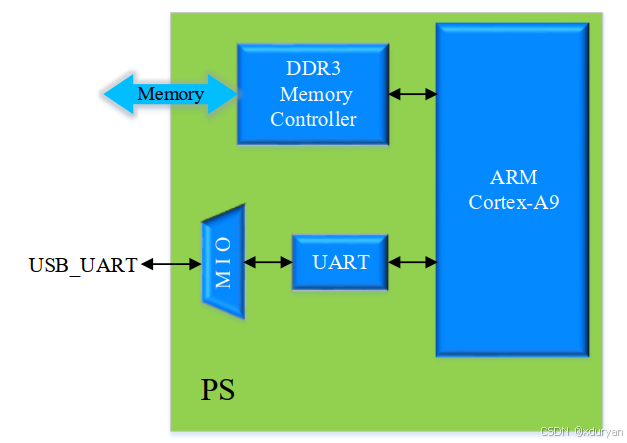
本实验任务是使用PS端UART控制器,完成串口中断数据环回的功能。
2 系统框图
3 硬件设计
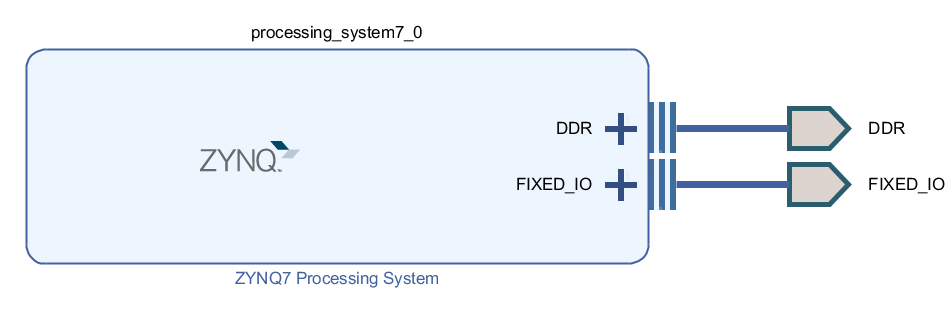
3.1 Block Design
- 添加ZYNQ7 Processing System IP核
- (1)在Peripheral I/O页面
- 1)勾选UART
- 2)正确选择Bank 0和Bank 1的电压(我使用的开发板UART在MIO48/49,即Bank1,电压为1.8V;刚开始没注意,使用Bank1默认电压3.3V,结果只能发不能收,调试半天也没能定位问题,最后甚至怀疑串口的接收线路有问题)
- (2)在DDR Configuration页面
- 1)DDR Controller Configuration下,合理配置Memory Type、Memory Part和Bus Width等参数
- (1)在Peripheral I/O页面
3.2 注意事项
无。
4 软件设计
4.1 注意事项
- 同时使能XUARTPS_IXR_RXOVR 和XUARTPS_IXR_TOUT,以支持不定长数据接收;
- 调试串口和业务串口最好分开,否则会有干扰
- (1)刚开始不懂,在程序中加入很多调试信息(printf打印函数),结果收发数据出现各种问题
- (2)本例使用的开发板只有一个串口,无法区分调试串口和业务串口,所以尽量不用printf打印函数
4.2 函数详解
- XUartPs_Recv函数
- (1)函数功能:从RX FIFO接收数据
- (2)函数实现:
- 1)禁用所有中断
- 2)设置缓冲区参数,包括请求接收的字节数、剩余待接收的字节数和指向下一个要接收的字节的指针
- 3)调用XUartPs_ReceiveBuffer函数,该函数完成数据接收功能并返回实际接收的字节数
- 4)恢复中断使能
- 5)接收XUartPs_ReceiveBuffer函数的返回值并返回
- XUartPs_ReceiveBuffer函数
- (1)函数功能:以轮询或中断驱动模式从RX FIFO接收数据存入缓冲区
- (2)函数实现:
- 1)从RX FIFO读取数据,如果RX FIFO不空且仍有数据需要读取到缓冲区中,则从RX FIFO中读取数据存入缓冲区(Loop until there is no more data in RX FIFO or the specified number of bytes has been received)
- 2)更新缓冲区指针和剩余字节数
- 3)返回实际读取的字节数
- XUartPs_SetRecvTimeout函数
- (1)设置超时计数器的超时周期(即初始值)
- (2)重启超时计数器(加载初始值并开始递减)
- 1)在程序下载完成后会立即收到一个超时中断,并打印"Rx timeout, receive 0 bytes."
4.3 工程源码
/************************** Include Files ***********************************/
#include "xparameters.h"
#include "xuartps.h"
#include "xscugic.h"
#include "stdio.h"
/************************** Constant Definitions ****************************/
#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define UART_INTR_ID XPAR_XUARTPS_1_INTR
#define BUFFER_SIZE 64 // 接收缓冲区大小
#define FIFO_TRIGGER_LEVEL 32 // FIFO触发阈值
#define RECV_TIMEOUT 4 // 接收超时时间(单位:波特率时钟周期)
#define DEBUG 0
/************************** Function Prototypes *****************************/
s32 UartPsInit(XUartPs *UartPsInstPtr, XUartPsFormat* UartFormatPtr);
s32 SetupInterruptSystem(XScuGic *IntcInstPtr, XUartPs *UartPsInstPtr);
void UartIntrHandler(void *CallBackRef);
/************************** Variable Definitions ****************************/
XUartPs UartInst;
XScuGic IntcInst;
u8 RxBuffer[BUFFER_SIZE] = { 0 }; // 接收缓冲区
int RxDataLength = 0; // 接收到的数据长度
XUartPsFormat UartFormat = {
XUARTPS_DFT_BAUDRATE, // 115200
XUARTPS_FORMAT_8_BITS,
XUARTPS_FORMAT_NO_PARITY,
XUARTPS_FORMAT_1_STOP_BIT
};
/************************** Function Implementation *************************/
int main()
{
//
s32 Status;
// 初始化UART
Status = UartPsInit(&UartInst, &UartFormat);
if (Status == XST_FAILURE) {
printf("Error : uart initialization failed.\n");
return XST_FAILURE;
}
// 设置中断系统
Status = SetupInterruptSystem(&IntcInst, &UartInst);
if (Status == XST_FAILURE) {
printf("Error : setup interrupt system failed.\n");
return XST_FAILURE;
}
// 主循环
while(1)
{
;
}
//
return XST_SUCCESS;
}
/****************************************************************************/
s32 UartPsInit(XUartPs *UartInstPtr, XUartPsFormat* UartFormatPtr)
{
//
s32 Status;
XUartPs_Config *UartConfigPtr;
// 查找UART配置
UartConfigPtr = XUartPs_LookupConfig(UART_DEVICE_ID);
if(NULL == UartConfigPtr)
{
return XST_FAILURE;
}
// 初始化UART
Status = XUartPs_CfgInitialize(UartInstPtr, UartConfigPtr, UartConfigPtr->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
// 设置UART数据格式
XUartPs_SetDataFormat(UartInstPtr, UartFormatPtr);
// 设置UART操作模式
XUartPs_SetOperMode(UartInstPtr, XUARTPS_OPER_MODE_NORMAL);
// 设置接收FIFO触发阈值
XUartPs_SetFifoThreshold(UartInstPtr, FIFO_TRIGGER_LEVEL);
// 设置接收超时
XUartPs_SetRecvTimeout(UartInstPtr, RECV_TIMEOUT);
// 设置中断掩码,使能FIFO触发中断和接收超时中断
XUartPs_SetInterruptMask(UartInstPtr, XUARTPS_IXR_RXOVR | XUARTPS_IXR_TOUT);
//
return XST_SUCCESS;
}
/****************************************************************************/
s32 SetupInterruptSystem(XScuGic *IntcInstPtr, XUartPs *UartInstPtr)
{
//
s32 Status;
XScuGic_Config *IntcConfigPtr;
// 初始化中断控制器GIC
IntcConfigPtr = XScuGic_LookupConfig(INTC_DEVICE_ID);
if (NULL == IntcConfigPtr)
{
return XST_FAILURE;
}
Status = XScuGic_CfgInitialize(IntcInstPtr, IntcConfigPtr, IntcConfigPtr->CpuBaseAddress);
if (Status != XST_SUCCESS)
{
return XST_FAILURE;
}
// 注册异常处理程序
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, IntcInstPtr);
Xil_ExceptionEnable();
// 连接UART中断处理程序
XScuGic_Connect(IntcInstPtr, UART_INTR_ID, (Xil_InterruptHandler)UartIntrHandler, (void *)UartInstPtr);
// 使能UART中断
XScuGic_Enable(IntcInstPtr, UART_INTR_ID);
//
return XST_SUCCESS;
}
/****************************************************************************/
void UartIntrHandler(void *CallBackRef)
{
//
XUartPs* UartInstPtr = (XUartPs*)CallBackRef;
u32 IsrStatus;
// 读取中断状态
IsrStatus = XUartPs_ReadReg(UartInstPtr->Config.BaseAddress, XUARTPS_IMR_OFFSET);
IsrStatus &= XUartPs_ReadReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET);
// 处理FIFO触发中断
if ((IsrStatus & (u32)XUARTPS_IXR_RXOVR) != (u32)0) {
// 读取FIFO中的数据
RxDataLength = XUartPs_Recv(UartInstPtr, RxBuffer, BUFFER_SIZE);
// 清除中断状态
XUartPs_WriteReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET, XUARTPS_IXR_RXOVR);
//
#if DEBUG
printf("Rx trigger, receive %u bytes.\n", RxDataLength);
#endif
}
// 处理接收超时中断
if ((IsrStatus & (u32)XUARTPS_IXR_TOUT) != (u32)0) {
// 读取FIFO中剩余的数据
RxDataLength = XUartPs_Recv(UartInstPtr, RxBuffer, BUFFER_SIZE);
// 清除中断状态
XUartPs_WriteReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET, XUARTPS_IXR_TOUT);
//
#if DEBUG
printf("Rx timeout, receive %u bytes.\n", RxDataLength);
#endif
}
//
if (RxDataLength > 0) {
// 处理接收到的数据
XUartPs_Send(UartInstPtr, RxBuffer, RxDataLength);
//
RxDataLength = 0;
}
//
return;
}

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)