库卡机器人组信号输出浮点数
plc对应配置:使用的为PROFINET通讯方式,PLC的机器人profinet地址是从600开始,创建4个对应变量进行连接,输出对应的变量即可传输机器人程序部分:发送标准编码的real数据,PLC端可直接使用ID数据进行real数据的判断。(注:使用CAST_TO函数后,Bytes[1]为对应二进制的低位,Bytes[4]为高位。上面的KUKA1对应的bytes...
·
plc对应配置:
使用的为PROFINET通讯方式,PLC的机器人profinet地址是从600开始,创建4个对应变量进行连接,输出对应的变量即可传输

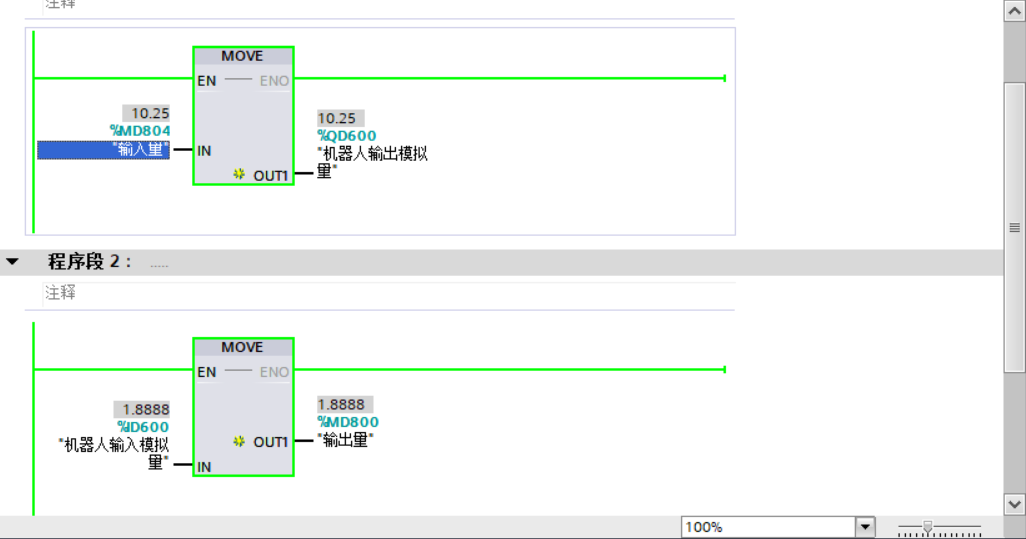
机器人程序部分:


发送标准编码的real数据,PLC端可直接使用ID数据进行real数据的判断。(注:使用CAST_TO函数后,Bytes[1]为对应二进制的低位,Bytes[4]为高位。上面的KUKA1对应的bytes4是为了将PLC能直接读数据而不用通过SWAP指令进行转换)
接收到的数据存于DATA2中。(注:PLC端直接设置QD数据为实数,则PLC端对应的IO映射到KUKA机器人端的IO,则PLC1为数据的高位,PLC4为数据的低位,反着对应也刚好不用使用swap指令移位)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 3
3 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)