ROS机器人操作系统——Launch文件与参数服务器详解(十五)
ROS机器人操作系统文章目录ROS机器人操作系统前言一、launch文件标签二、launch文件标签详解1.根标签2.嵌套3.节点总结前言ROS中的launch文件与参数服务器在我们调试机器人的时候非常重要,对于launch文件以及参数服务器我们要深入了解学习。一、launch文件标签前面说到,launch文件是可实现多节点启动和参数配置的xml文件。二、launch文件标签详解1.根标签<
·
ROS机器人操作系统

前言
ROS中的launch文件与参数服务器在我们调试机器人的时候非常重要,对于launch文件以及参数服务器我们要深入了解学习。
一、launch文件标签
前面说到,launch文件是可实现多节点启动和参数配置的xml文件。
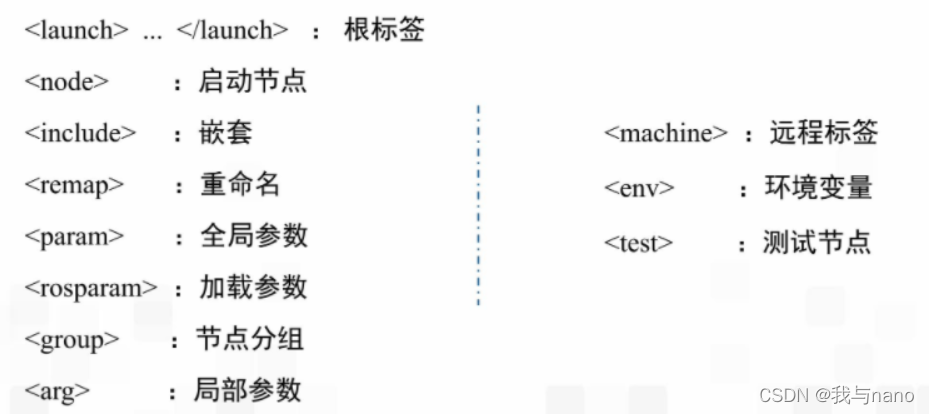
二、launch文件标签详解
1.根标签
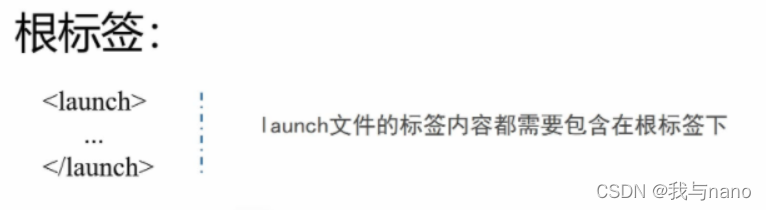
<launch>
.......
.......
</launch>
2.嵌套

通过include然后file=“美元符号路径加名字”
用include打开另外一个文件
3.节点
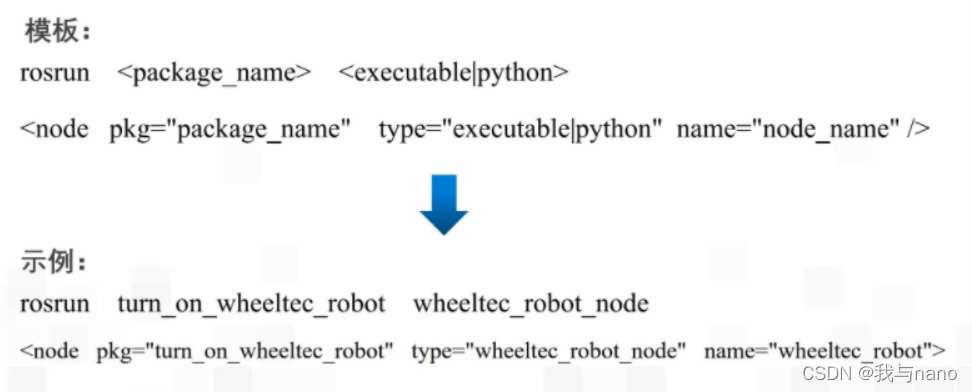
rosrun 功能包的名字 可执行文件名
一个node标签启动一个节点 
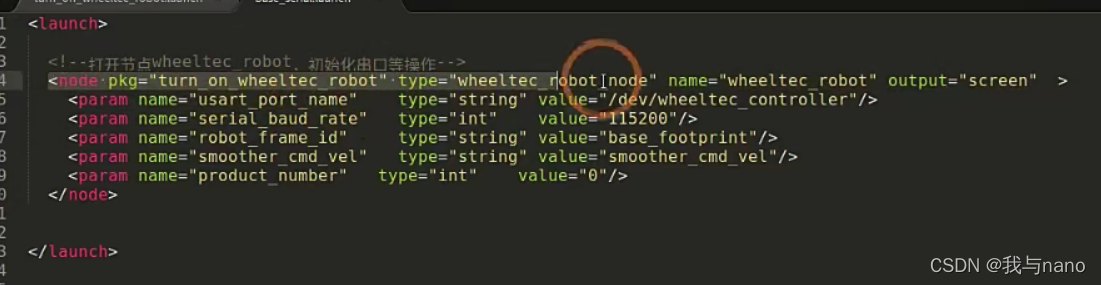
3.参数
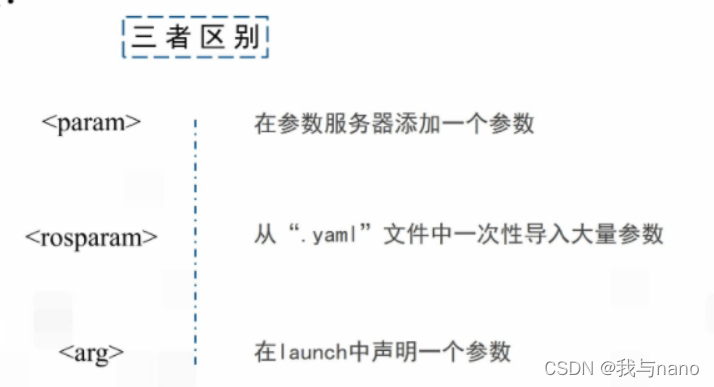
4.参数服务器
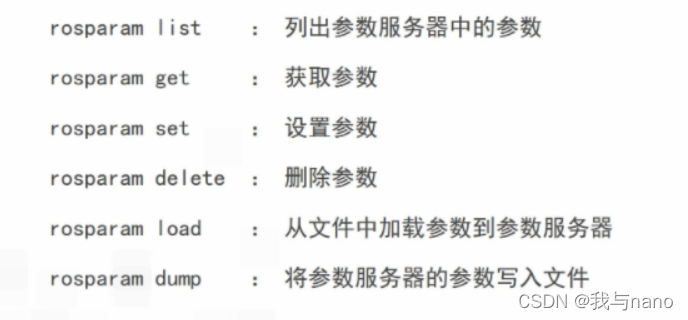
在机器人系统中,参数是很多的,ROS为我们提供了参数服务器这个功能方便我们修改参数。
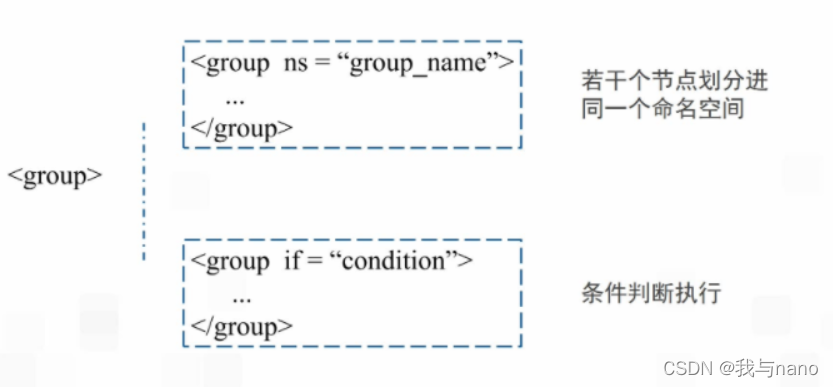
5.节点分组
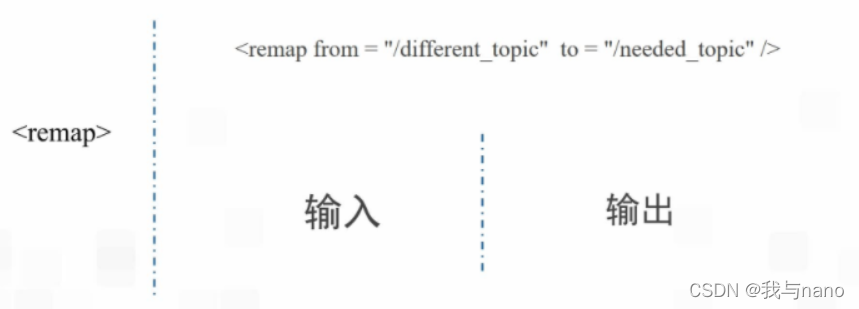
6.重命名
总结
launch文件是我们在学习机器人时最最常用的一个东西,熟悉launch文件的使用是非常重要的。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)