示教器重定位下机器人动作_ABB机器人学习笔记(四)-手动操纵机器人
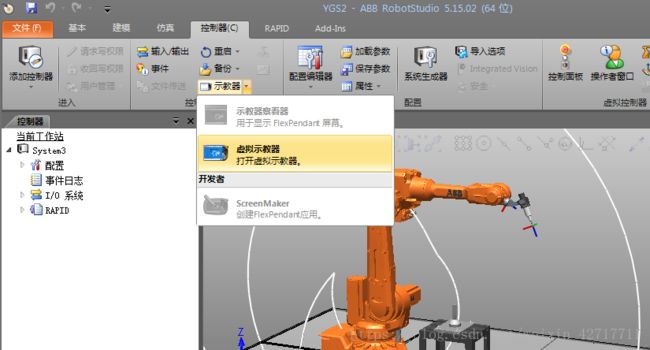
接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器 打开虚拟控制面板,将钥匙开关打到手动限速模式: 在示教器主界面中选择手动操纵 选择动作模式,默认的为1-3轴 点进去之后可以看到下面有四个选项,分别为
接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。
1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器
打开虚拟控制面板,将钥匙开关打到手动限速模式:

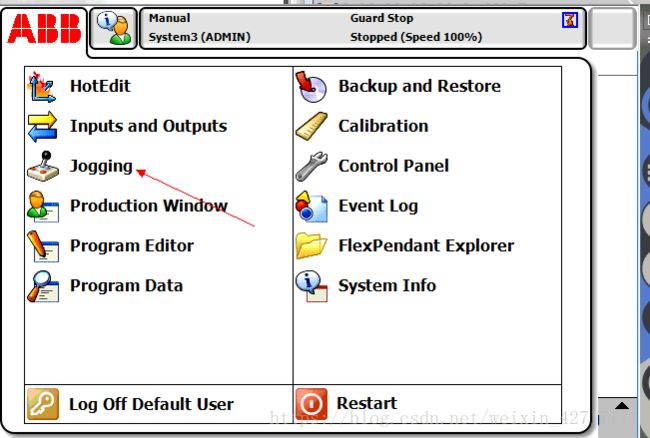
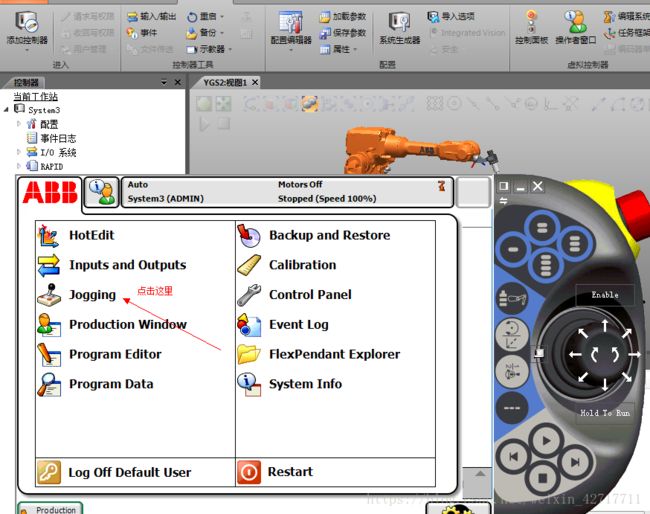
在示教器主界面中选择手动操纵
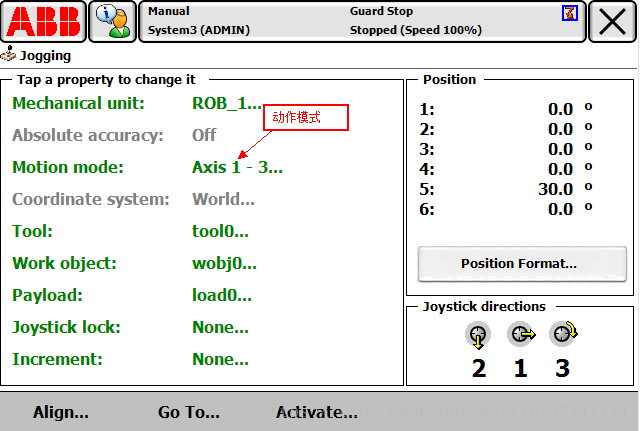
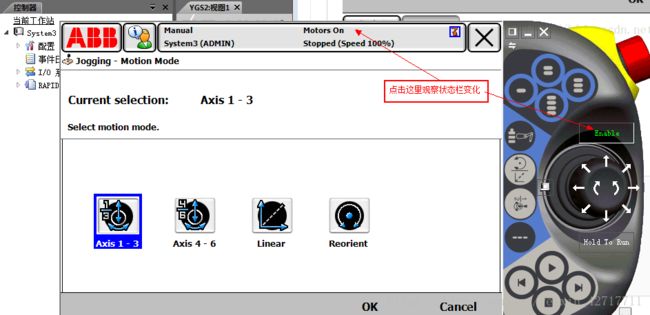
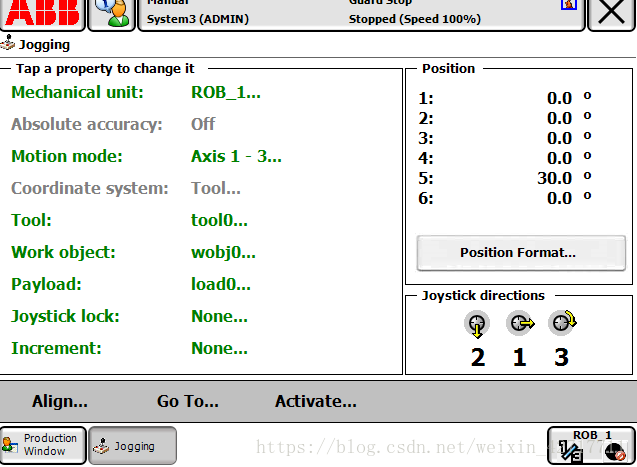
选择动作模式,默认的为1-3轴
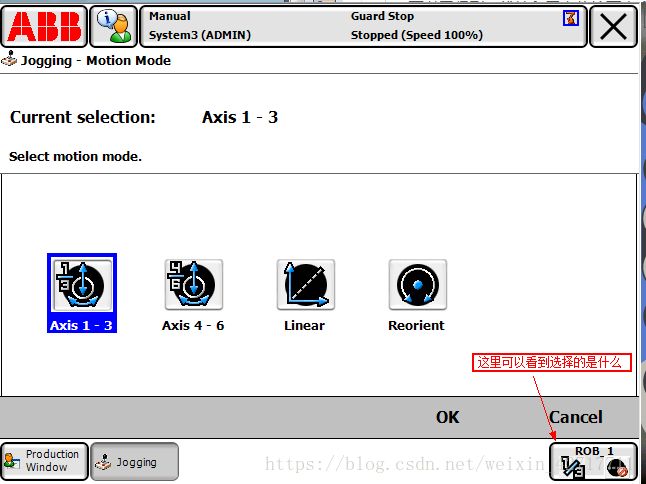
点进去之后可以看到下面有四个选项,分别为1-3轴,4-6轴,线性,重定位,选择4-6轴即可操纵4-6轴,我们在示教器右下角也可以看得到,线性和重定位接下来会学习
点击示教器中的使能按钮Enable,在状态栏中可以看到电机开启(由guide stop-->motors on
)
操纵杆的操纵幅度和机器人运动是相关的,操纵幅度越大,机器人运动越快,反之则越慢。
2.线性运动
机器人的线性运动是指安装在机器人第六周法兰盘上工具的TCP在空间中做线性运动。TCP是指工具中心点Tool Center Point的简称,机器人只有一个默认的工具中心点,它位于安装法兰盘的中心
3.重定位运动
机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间绕着坐标轴旋转的运动,也可以理解为机器人绕着工具点TCP点做姿态调整的运动。
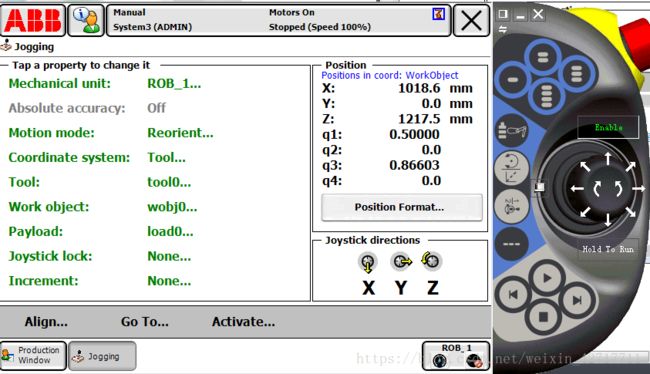
方法:(1)点击示教器ABB,在主界面中选择手动操纵
(2)单击动作模式点进去选择重定位然后确定

(3)选择工具坐标和参考的坐标系
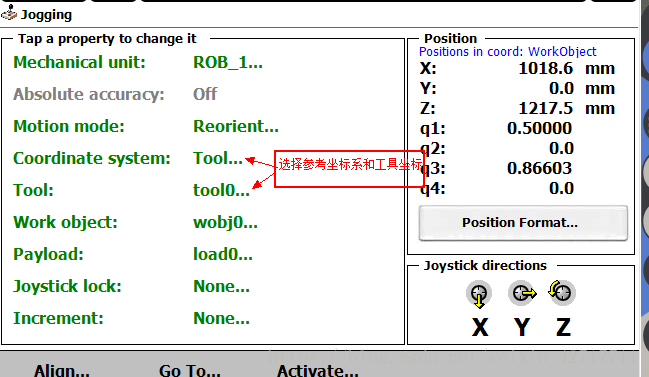
(4)点击虚拟示教器使能按钮Enable,在状态栏中确认电机开启状态,右下角显示轴XYZ的操纵杆方向,黄箭头代表正方向

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)