机器人抓取相机标定过程
相机标定
相机标定
1.获得一张全白图片,并将图片像素修改为电脑相机的像素。
修改像素值步骤如下:
1、先右击从图片的属性中看原来的图片分辨率是多少。
2、使用画图方式打开图片,并点击工具中的重新调整大小这个选项。
3、把保持横纵比前面的勾去掉,在水平和垂直框中输入自己的分辨率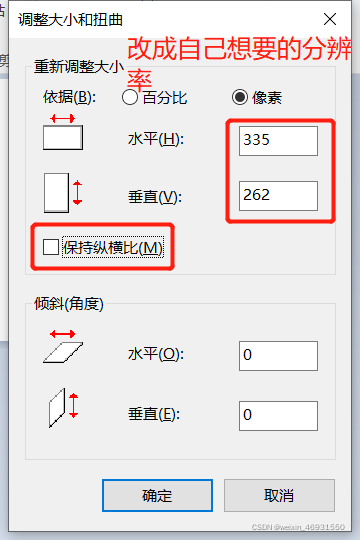
棋盘格生成方法,链接,,另外,也可以从网上下载不同的标定板,标定板链接
使用matlab工具箱进行标定,链接下方有详细标定过程,
打开matlab,找到相机标定工具箱,
两种方式进行标定,选择图片,或者相机实时标定,这里选择图片的形式进行标定。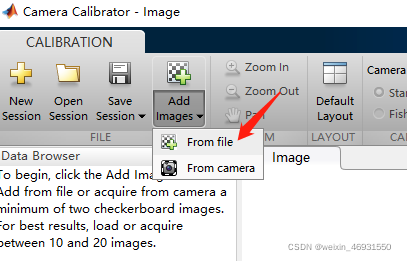
参数设置。Radial Distortion.畸变参数(需理解畸变参数含义)。2 Coefficients 表示计算2个畸变参数:k1/k2;3 Coefficients 表示计算3个畸变参数:k1/k2/k3。一般来说选择计算2个畸变参数即可。计算3个畸变参数时,k3值比较小,大概量级为1e-5,可以忽略(实际计算过程中,如果考虑太多高阶的畸变参数,会导致标定求解的不稳定。如果选择了计算3个畸变参数,需要注意畸变矩阵的排列顺序:[k1,k2,p1,p2,k3])。
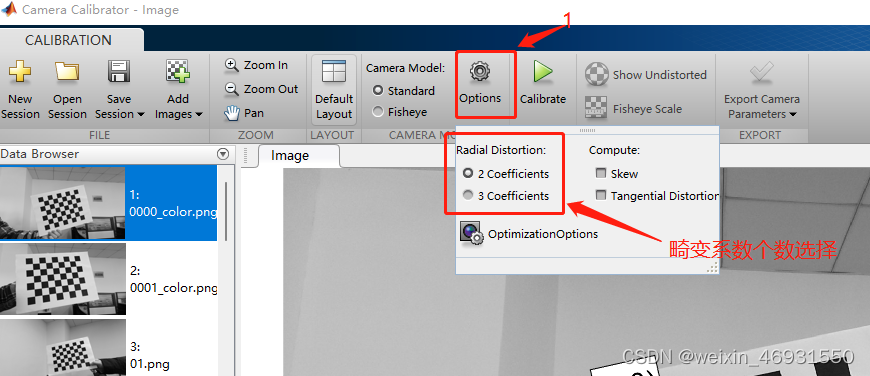
点击**“Calibrate”**开始标定。添加图片得到如下信息。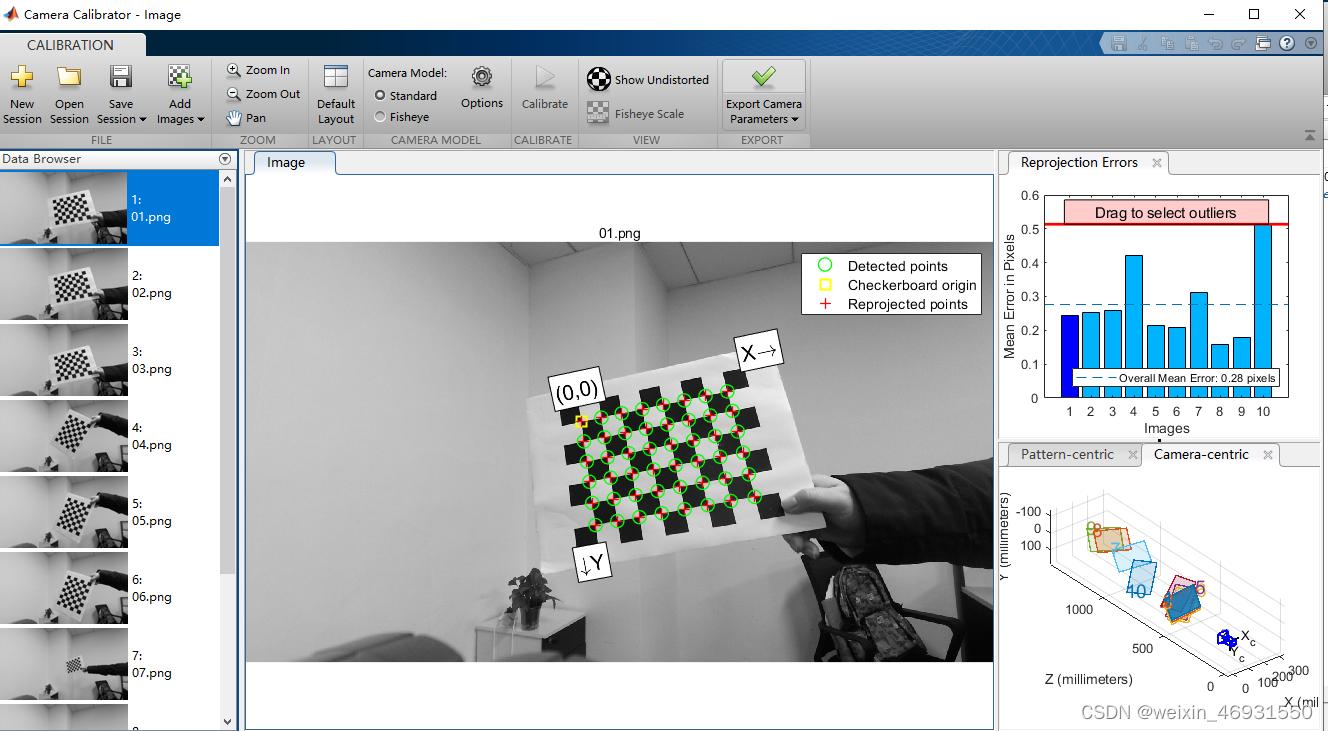
点击导出相机参数,然后点击确定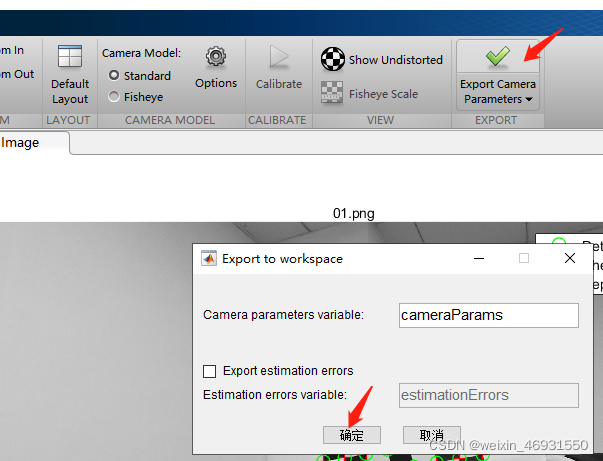
相机的相关参数
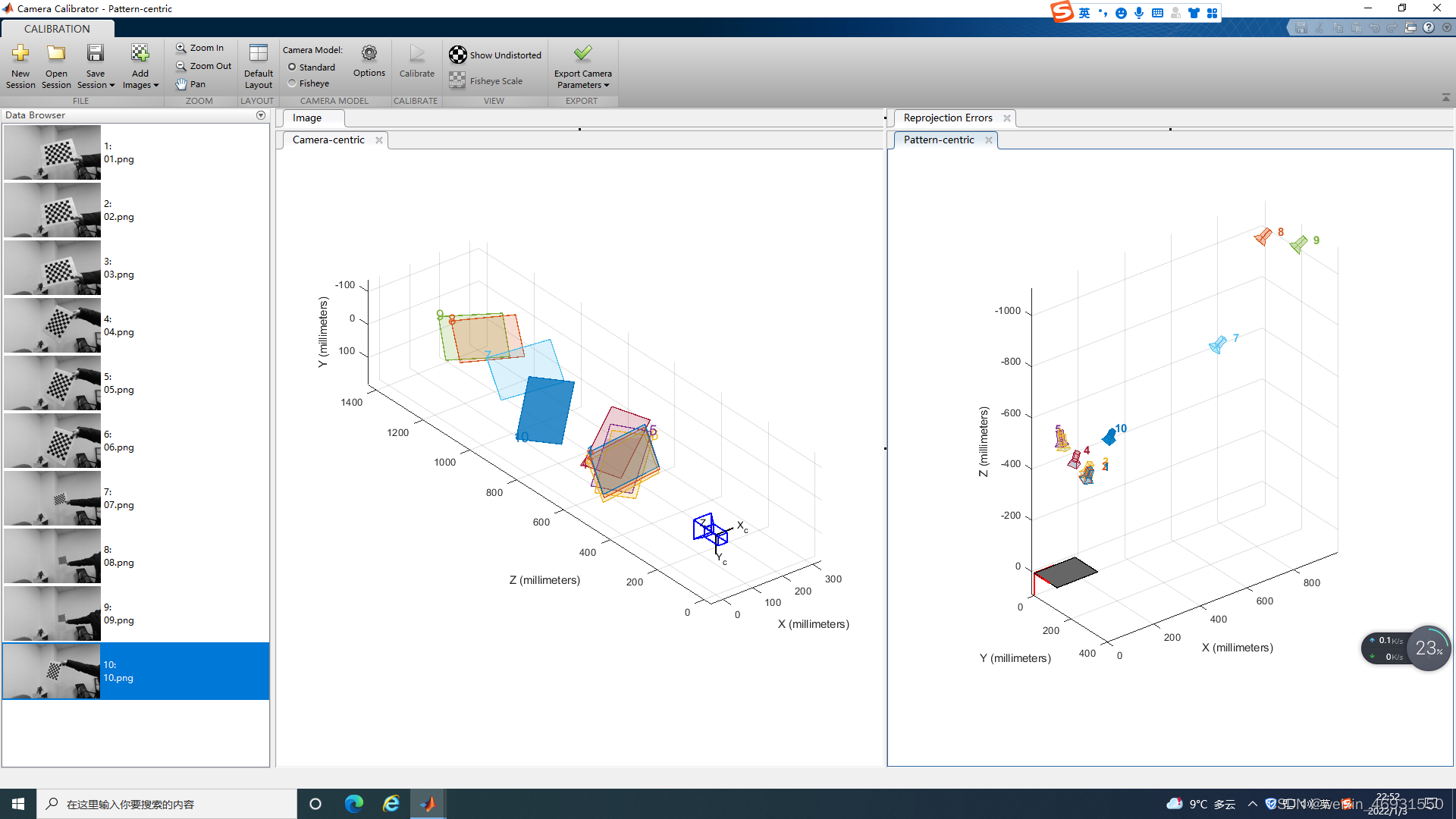
图像采集中所有标定板与相机之间的位置关系图
标定板与相机之间的位置关系
所有像素点之间的误差
所有像素点之间的误差
切换到MATLAB主页,双击右侧参数,获取需要的参数。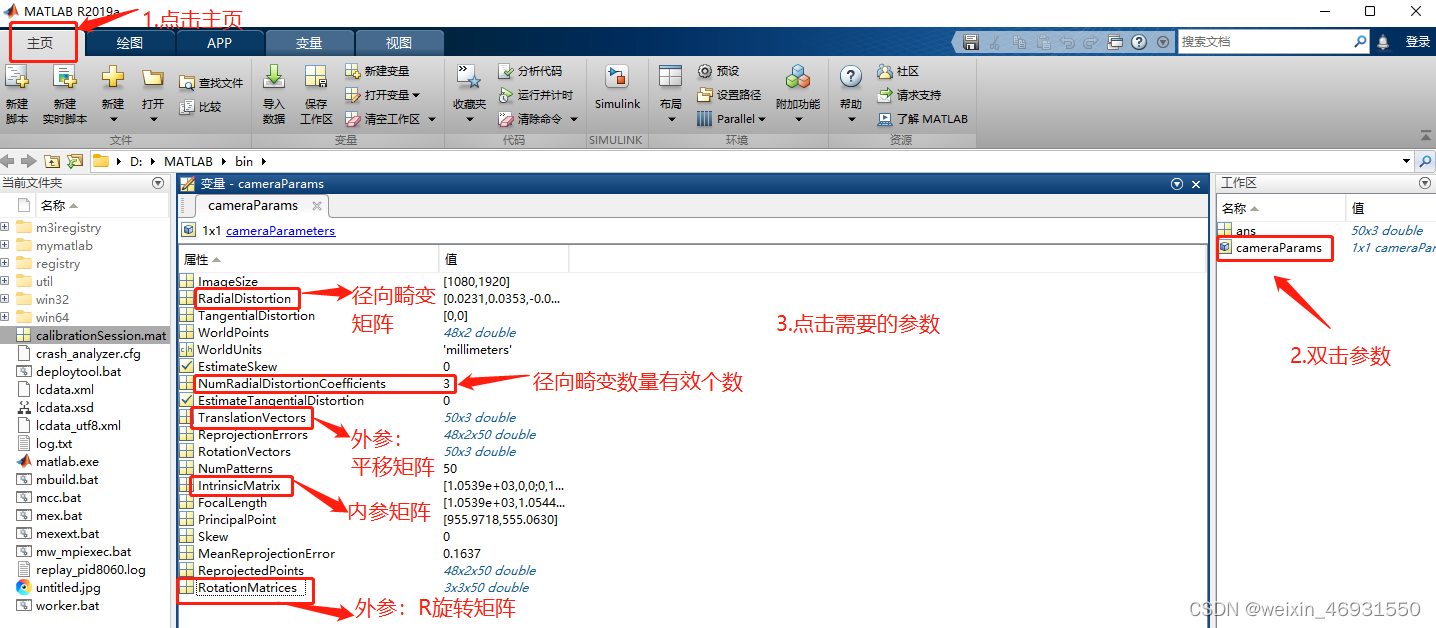

或者是在matlab命令行输入得到相机标定参数(内参矩阵、径向畸变、外参旋转矩阵、外参平移矩阵):
内参矩阵
cameraParams.IntrinsicMatrix
外参旋转矩阵cameraParams.RadialDistortionMatrics(可能有误)
cameraParams.RotationMatrices
外参平移矩阵
cameraParams.TranslationVectors
径向畸变、切向畸变
cameraParams.RadialDistortion
cameraParams.TangentialDistortion
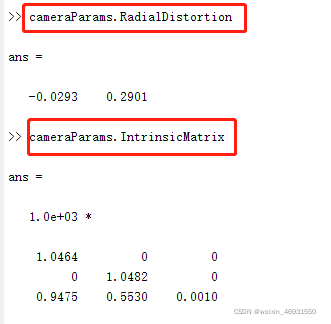
利用函数cameraParms.RadiaDistortion即为相机的畸变矩阵,函数cameraParms.IntrinsicMatrix求内参矩阵。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

{kind=link}
{kind=link}
{kind=link}
所有评论(0)