两轮差速移动机器人位姿误差状态方程推导
就是e_y,其次,还要知道v_x=vcosθ用于第一行的代换。笔者就是一直没有搞清楚e_y和(y_r - y)不是一个含义导致证明不下去,写这篇文章也是加深记忆。[1]周星,吴洪明.AGV轨迹跟踪自适应模糊控制器设计[J].起重运输机械,2017,(07):19-22.图 机器人行驶轨迹偏差图[1]
·
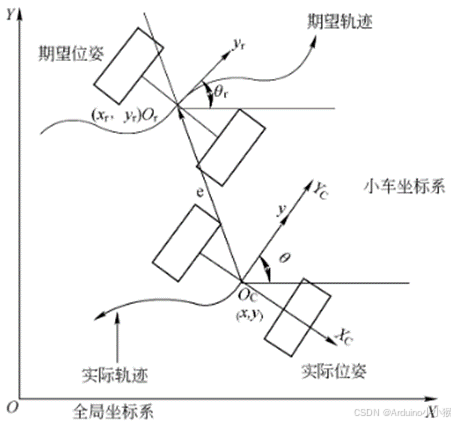
图 机器人行驶轨迹偏差图[1]
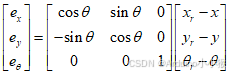
通过坐标转换,可以得到相对于小车坐标系的位姿误差:
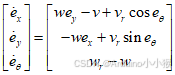
对上式求导,得到位姿误差状态方程为:
接下来给出e_x求导计算证明过程:
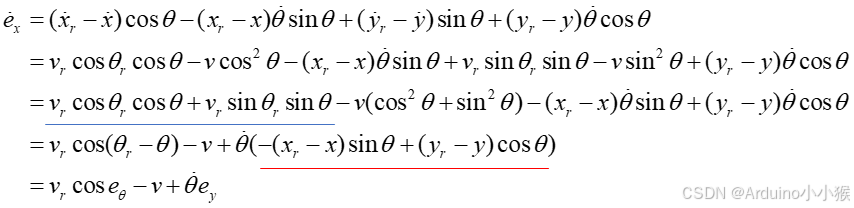
说明:蓝线部分是余弦求和公式,红线部分就是e_y,其次,还要知道v_x=vcosθ用于第一行的代换。笔者就是一直没有搞清楚e_y和(y_r - y)不是一个含义导致证明不下去,写这篇文章也是加深记忆。
参考文献
[1]周星,吴洪明.AGV轨迹跟踪自适应模糊控制器设计[J].起重运输机械,2017,(07):19-22.

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)