登录社区云,与社区用户共同成长
邀请您加入社区
概述应用层传输层网络层链路层物理层
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
Python实现自主导航核心技术解析
以下通过几个关键模块的代码片段,展示如何用Python实现自主导航的基础功能。1. 路径规划:A* 算法实现A*算法是解决栅格地图上全局路径规划的经典方法。2. 路径跟踪:纯追踪算法 (Pure Pursuit)纯追踪算法通过计算前视距离和曲率来控制机器人跟踪路径。3. 与ROS集成:发送导航目标点在ROS1中,自主导航通常使用节点。可以通过Python发送一个消息到话题来指令机器人前往某个目标点
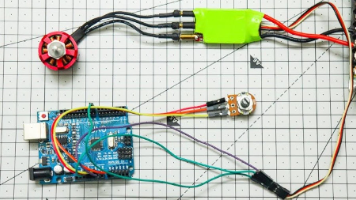
【花雕学编程】Arduino BLDC 之机器人动态变换编队(虚拟结构切换)
宇树G1二次开发核心架构揭秘
宇树G1是一款功能强大的人形机器人平台,其二次开发体系围绕四大支柱构建,旨在为研究者和开发者提供从底层控制到高层智能决策的全栈工具链。G1的软件系统采用分层设计,以和为核心通信中间件,确保了模块间数据交换的实时性与可靠性。G1的SDK提供了从底层关节到高层整机动作的多级控制接口,是二次开发中最常使用的部分。在实机部署前,利用仿真环境进行算法开发和测试至关重要,能极大提高效率并保障安全。LeRobo
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动












 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)