全景图拼接开源算法opendronemap3.1.7版笔记
OpenDroneMap是一个开源的航拍图像处理工具,可以把航拍图像进行点云、正射影像和高程模型等处理,也可以做3维重构,生成3维模型。
目录
1.ODM算法简介
OpenDroneMap是一个开源的航拍图像处理工具,可以把航拍图像进行点云、正射影像和高程模型等处理,也可以做3维重构,生成3维模型。
直接下载docker镜像:
docker pull opendronemap/odm:gpu2.算法流程
config.py中的顺序就是算法流程
['dataset', 'split', 'merge', 'opensfm', 'openmvs', 'odm_filterpoints',
'odm_meshing', 'mvs_texturing', 'odm_georeferencing',
'odm_dem', 'odm_orthophoto', 'odm_report', 'odm_postprocess']
下面结合打印信息看
2.1 dataset读图
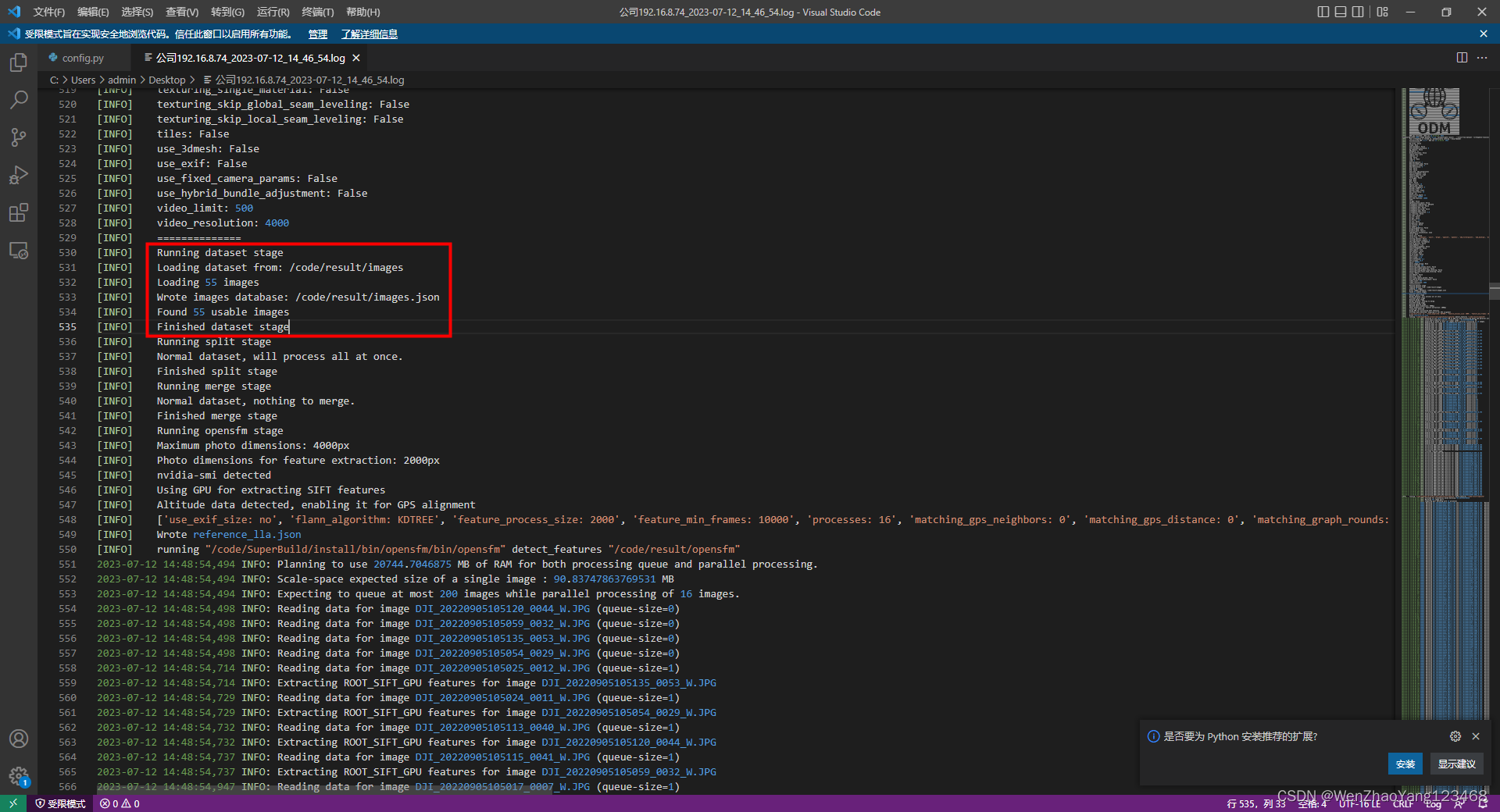
2.2 opensfm
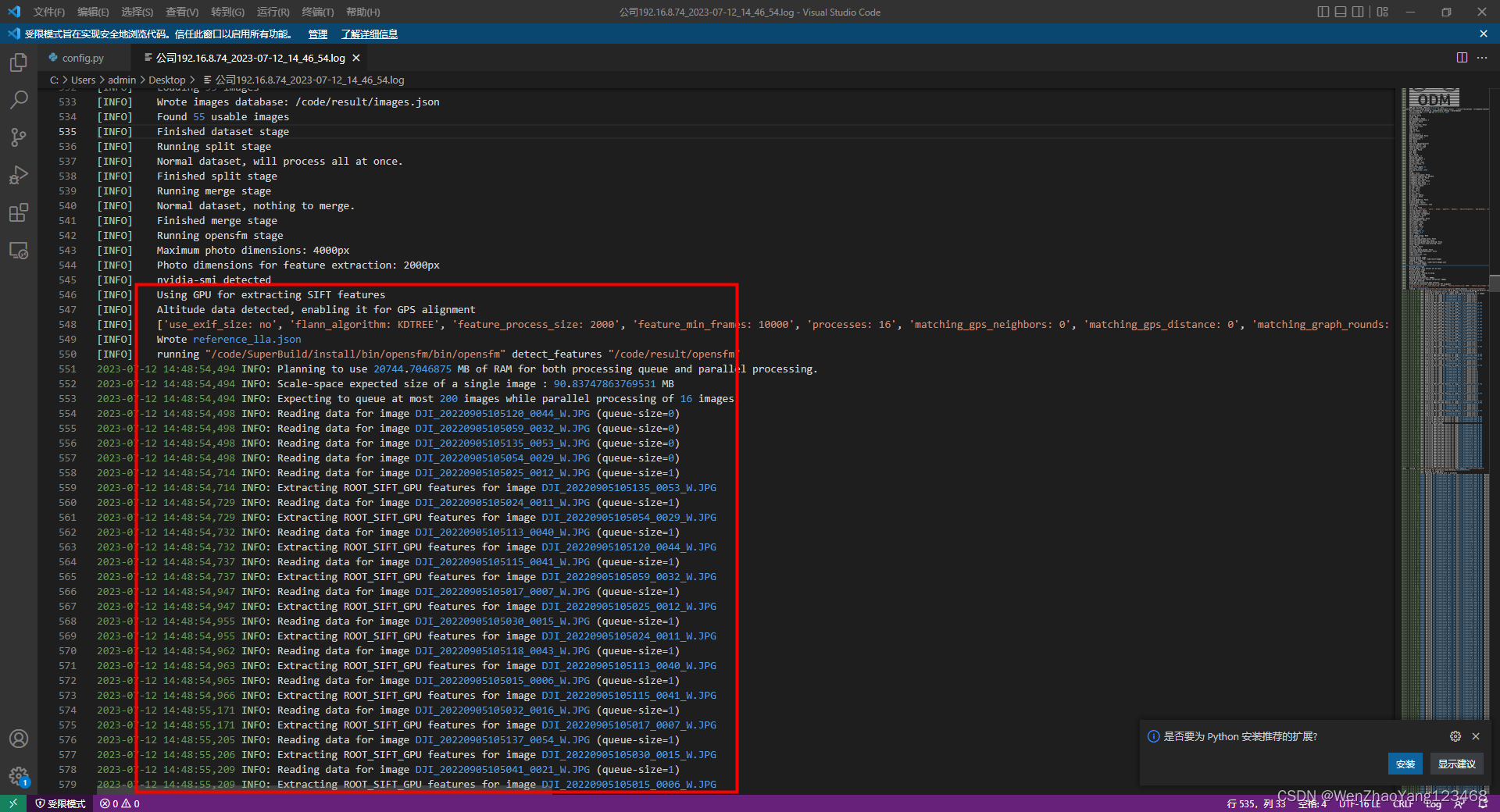
2.2.1 提取sift特征
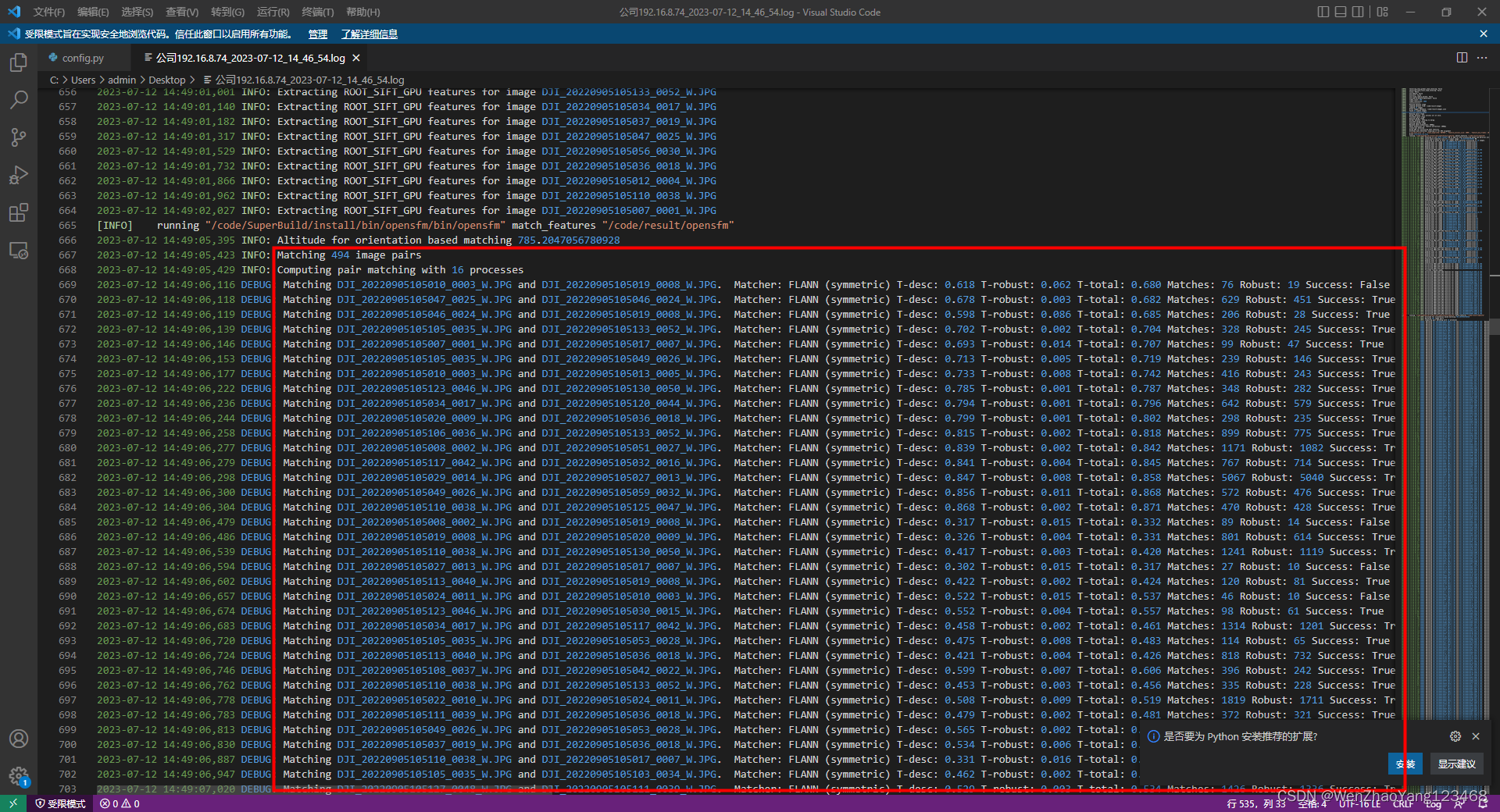
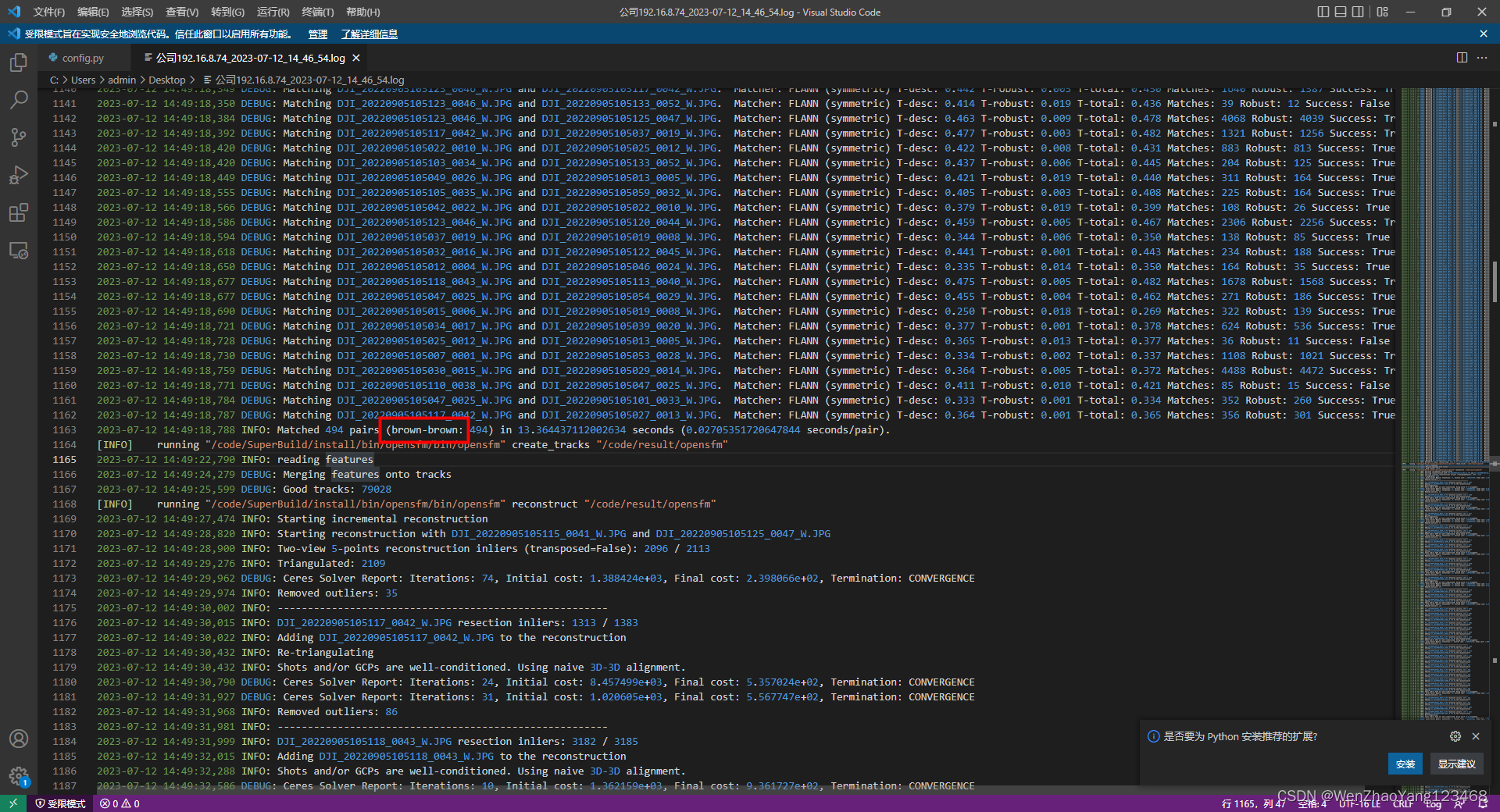
2.2.2 图像特征匹配
2.2.3 自动选择相机投影类型
2.3 odm_orthophoto生成正射影像/全景图
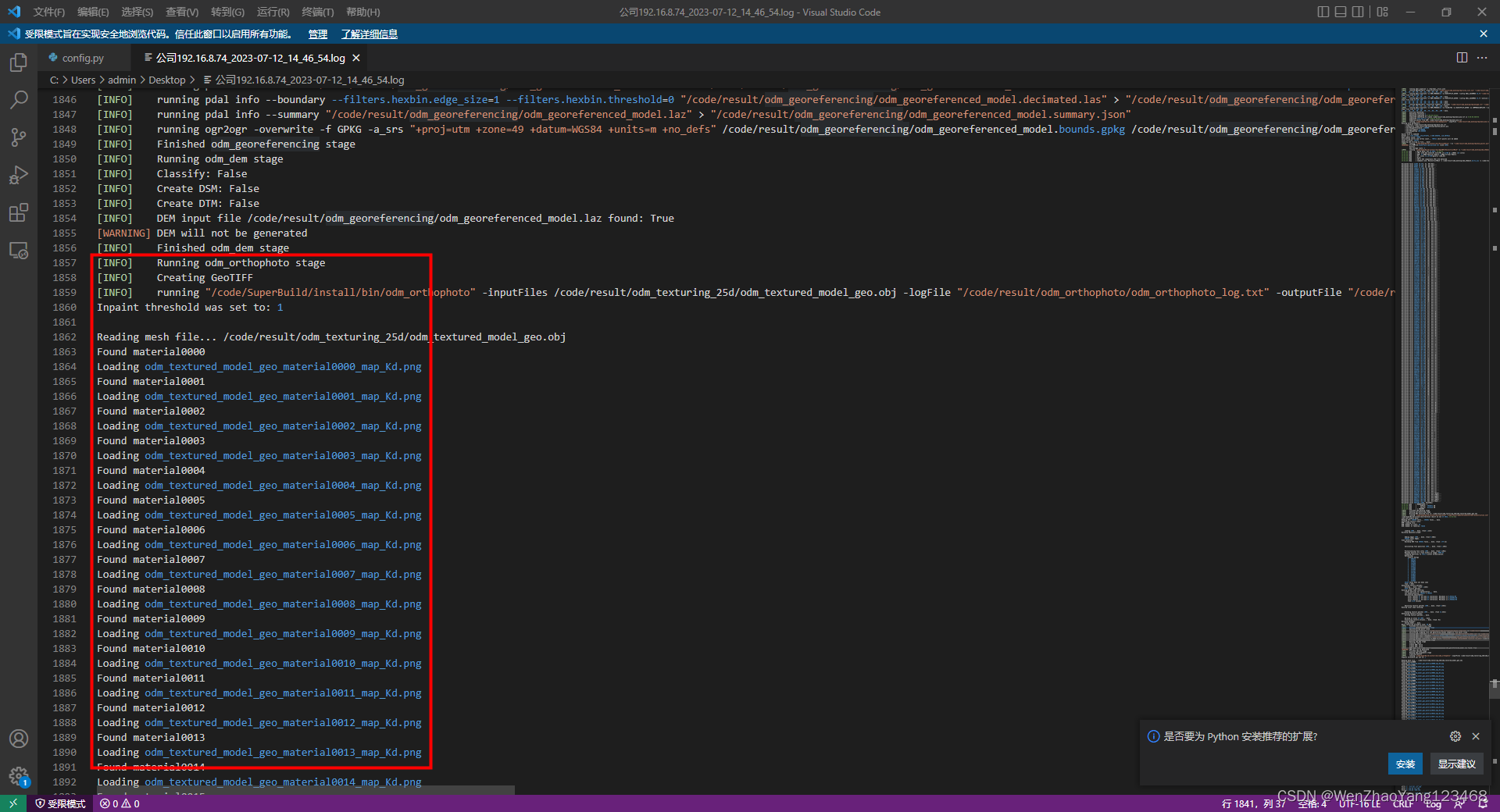
其中,-resolution值并不是config.py中输入值,Note that this value is capped by a ground sampling distance (GSD) estimate,意思是受地面采样距离估计值限制。
3.config.py参数含义
--project-path: 输入输出文件夹,例如命名为"result",输入图像存放"images"文件夹中(不可改变),"images"文件夹存放在"result"文件夹中;输出位于result文件夹下,和"images"文件夹同级;
name: "result"文件夹中的子文件夹,我习惯不用子文件夹,直接输入".",输入输出都在"result"中;
--rerun-all 重新运行所有流程;
--rerun-from 从某个流程开始重新运行,可以节约测试时间;
--min-num-features 图像最少特征数;
--feature-type 提取特征类型,默认sift特征;
--feature-quality 特征质量高低;
--matcher-type 图像特征匹配算法;
--camera-lens 相机投影类型,默认自动选择;
--mesh-octree-depth 重建网格细节数值,默认11;
--orthophoto-resolution 正射影像/全景图分辨率大小,默认5;
--fast-orthophoto 快拼模式;个人尝试发现关闭后拼接效果更好

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)