机器人学导论(第二章)
源自:机器人学导论(原书第4版) by John J. Craig贠超 王伟
·
1.描述:位置/姿态/位姿
位姿=位置+姿态
-
位置:用一个列向量表示,记录在某一坐标系(左上角标号)下xyz轴的分量
-
姿态:在物体上固定一个坐标系,并给出该坐标系相对于固定坐标系的表述;3个位置矢量可确定一个姿态
AXB:参考A坐标系,坐标系B主轴方向的单位矢量
ABR:以A为固定坐标系,B的姿态描述(即旋转矩阵rotation)

法二:由于坐标轴都是单位向量,所以矩阵上每个分量为坐标轴的方向余弦
rij有以下关系:
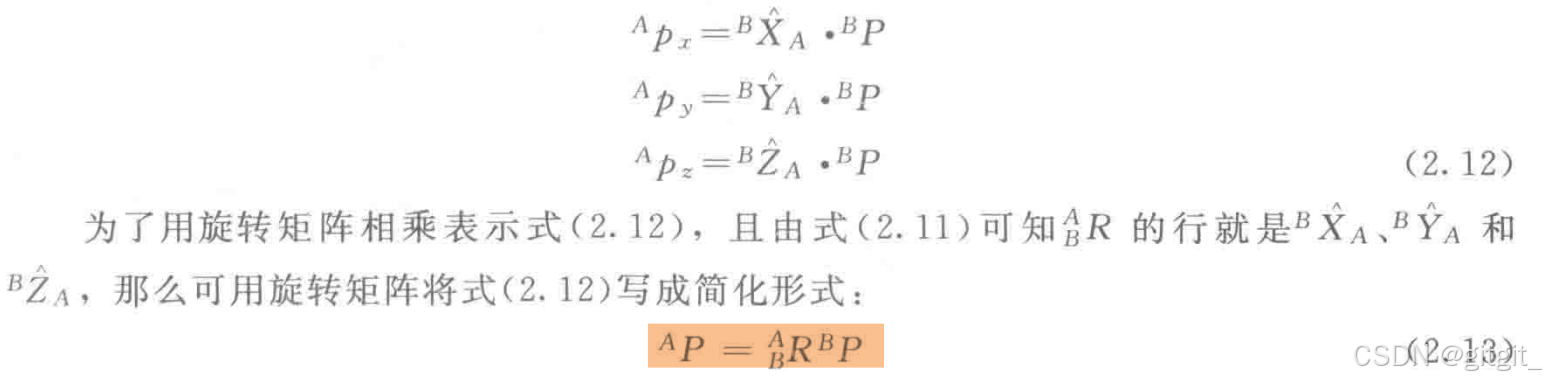
每个矢量在其参考坐标系中轴线方向上投影的分量表示
固定坐标系转换关系式:![]()
原理:位置矢量为单位向量且两两正交
-
位姿:四个矢量为一组,表示位置与姿态信息

2.映射(不同坐标系下同一位置的描述)
-
坐标平移:{A}和{B}具有相同姿态时,同一位置在不同坐标系的关系如下:

-
坐标旋转:{A}和{B}同原点,但姿态不同时,同一位置在不同坐标系的关系如下:
-
一般变换
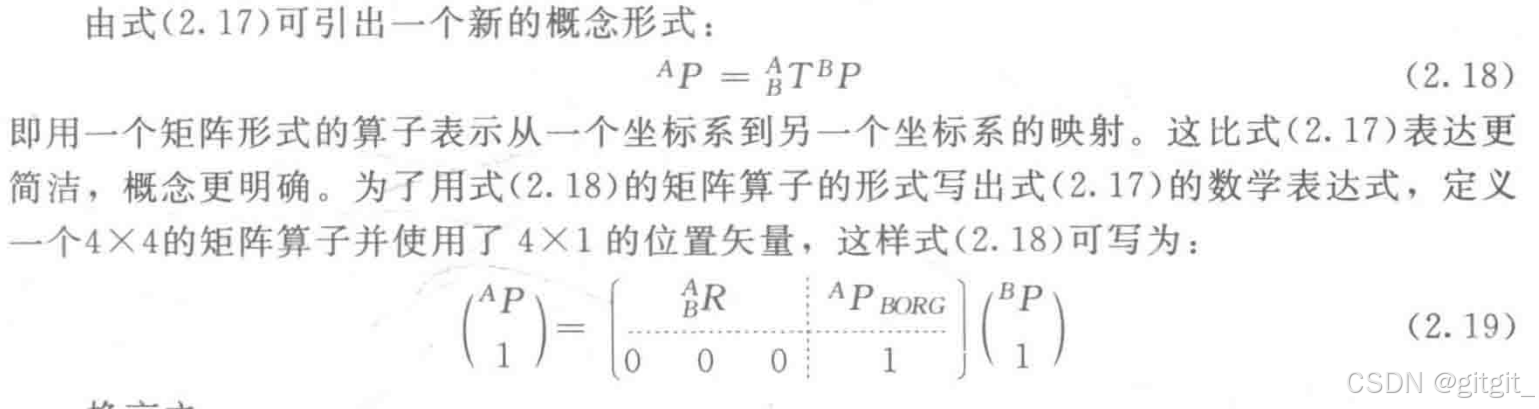
首先将{B}变换到一个中间坐标系(和{A}姿态相同,与B同原点),再进行坐标平移
![]()
法二:写成齐次变换矩阵(图中4*4矩阵):
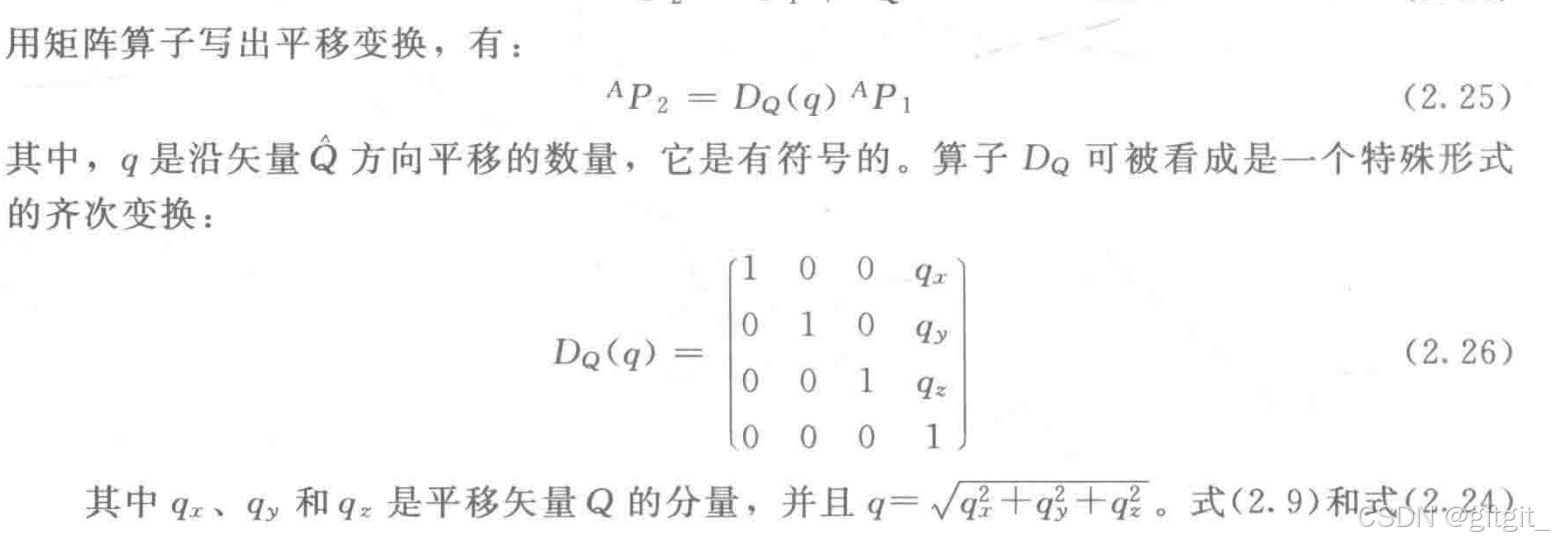
3.算子:平移/旋转/变换(一般计算位置矢量位移后的新矢量)
- 平移算子
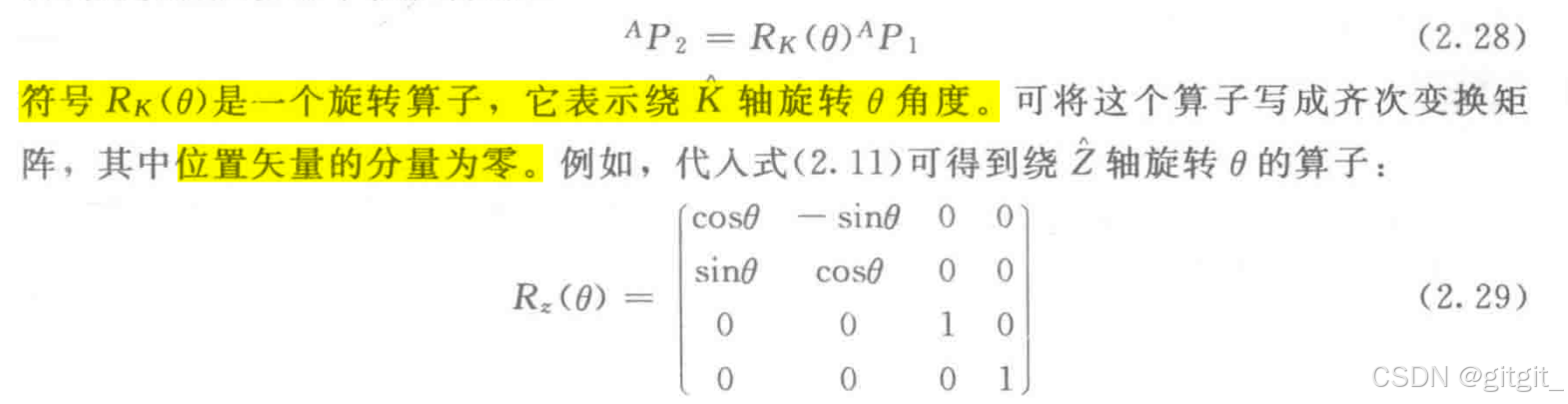
- 旋转算子
因只针对一个坐标系,所以旋转矩阵Rk(α)无上标下标
- 变换算子(同一般变换,但注意无上下标)

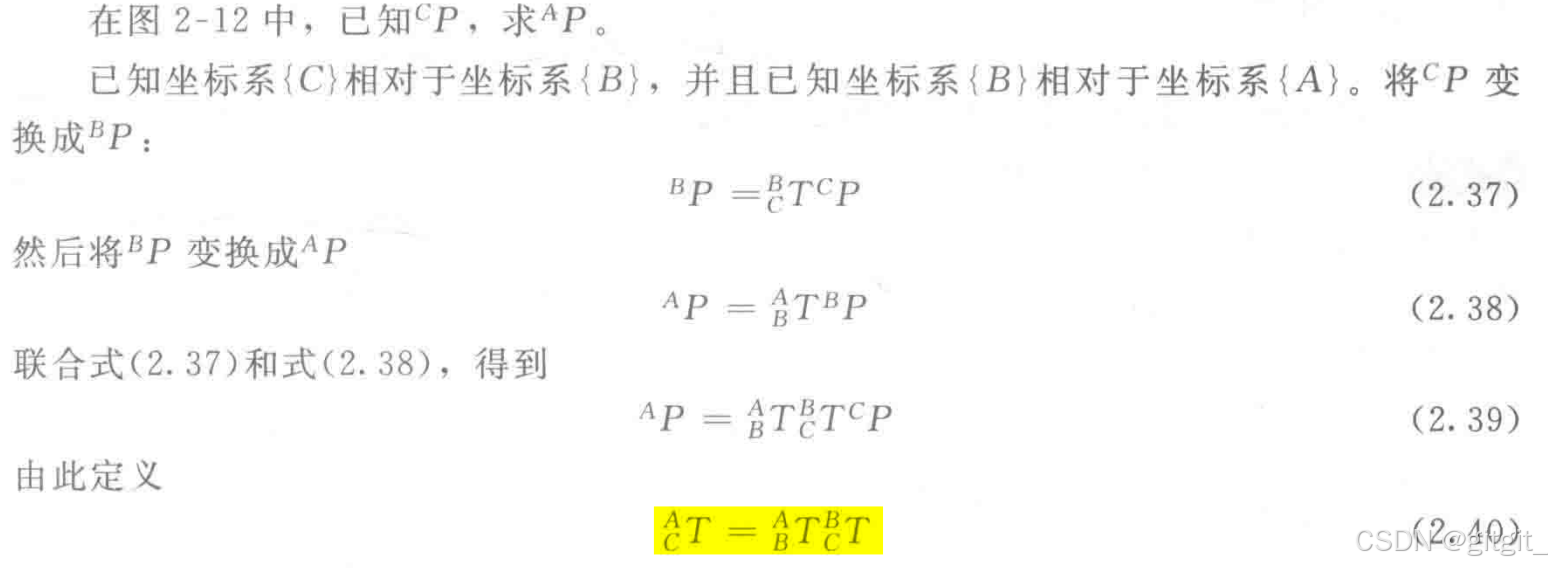
3.变换的计算
- 齐次变换矩阵间的关系(理解上下标之间的关系)
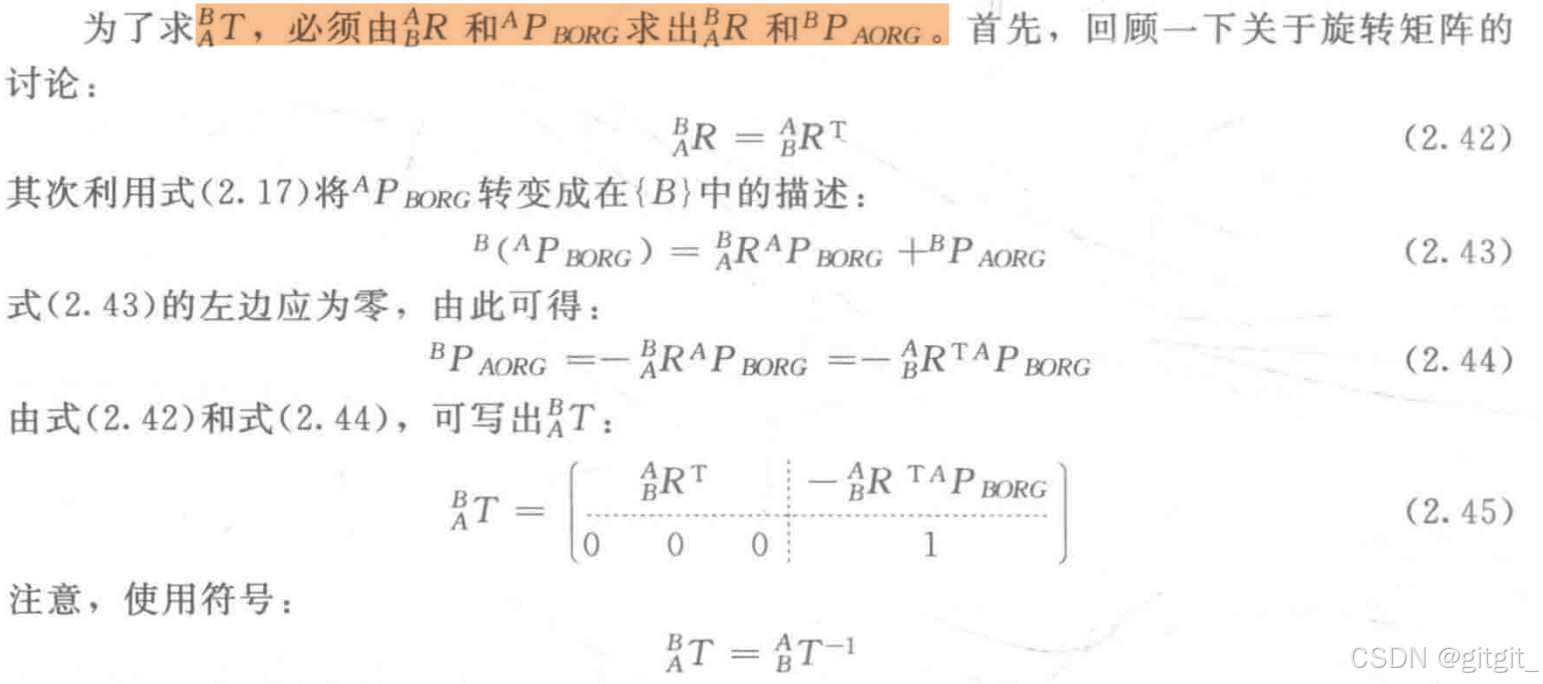
- 逆变换(更换固定坐标系,齐次变换矩阵的计算)
4.其他姿态描述
- xyz固定角
A与B姿态相同(三个坐标轴重合),使B绕A顺时/逆时针旋转一定角度,旋转矩阵的关系如下:

其中: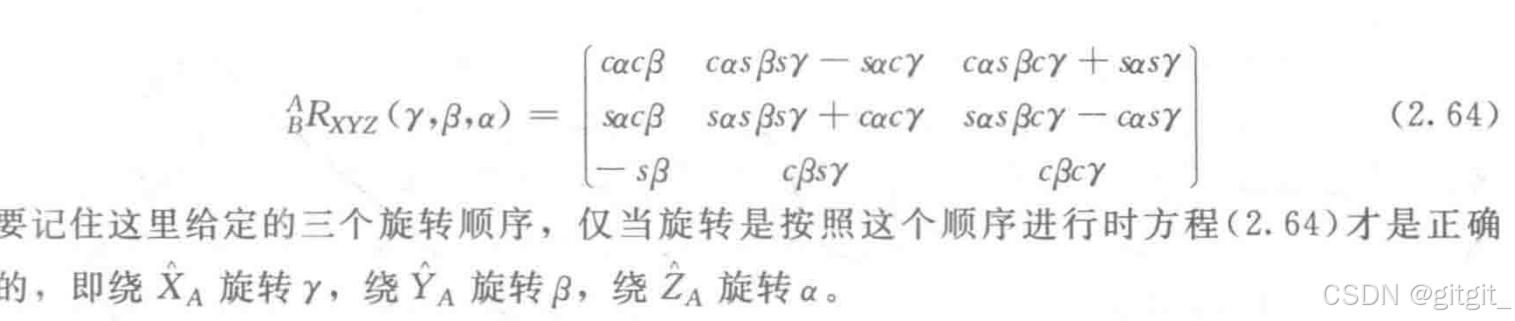
可通过Rxyz反解三个旋转角(可能存在多解)
- zyx欧拉角(一般应用于航空航天)
A与B姿态相同,绕B顺时/逆时针旋转一定角度,旋转矩阵的关系如下:
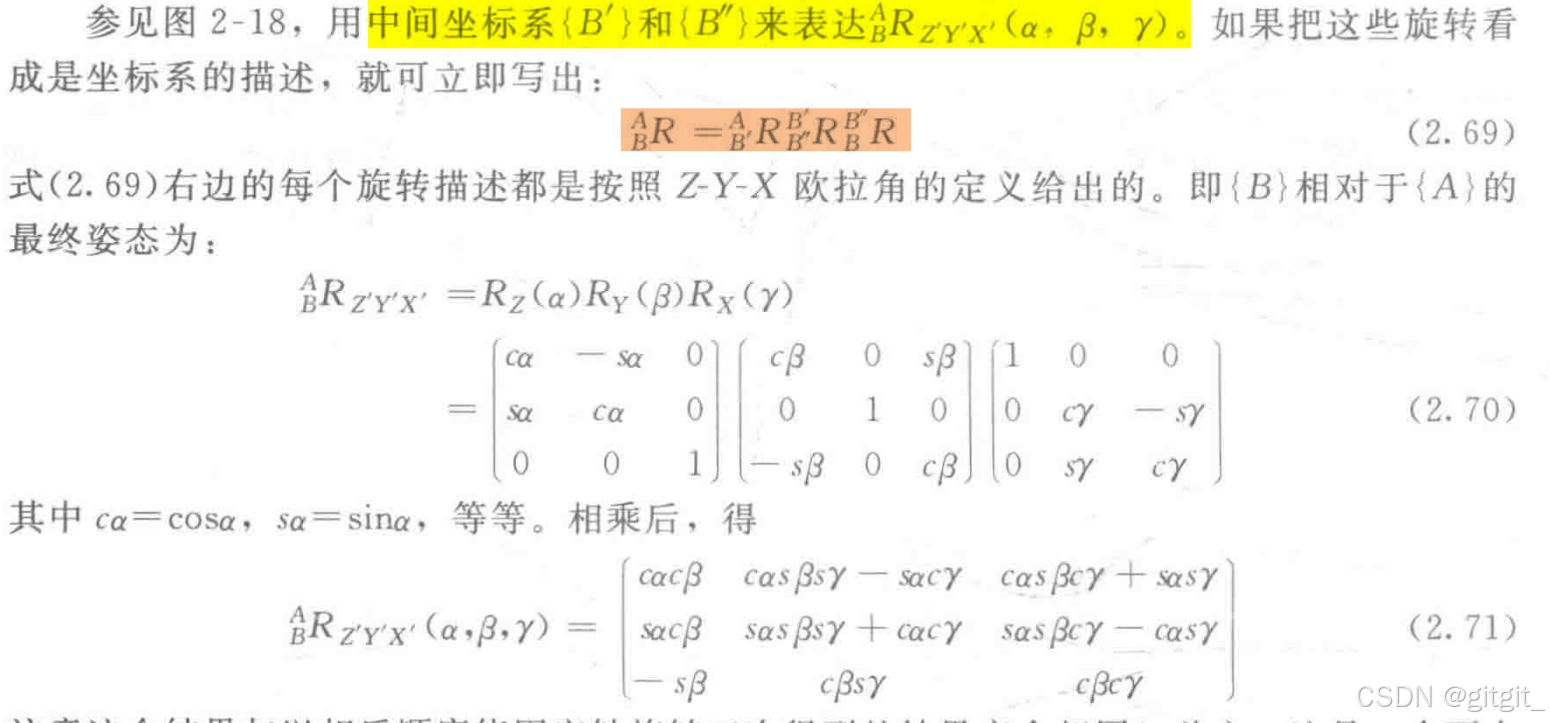
- zyz欧拉角(标准欧拉角)

- 其他描述方法
等效角度-轴线表示法,欧拉参数,位姿示教。
5.矢量分类
线矢量,自由矢量

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)