PCL 计算点云法向量
【代码】PCL 计算点云法向量。
·
完整代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/features/linear_least_squares_normal.h> // 线性最小二乘
#include <boost/thread/thread.hpp>
#include <pcl/visualization/pcl_visualizer.h>
int main()
{
// -------------------------------加载点云------------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile("../../data/000000.pcd", *cloud) == -1)
{
PCL_ERROR("Could not read pcd file!\n");
return -1;
}
// ----------------------线性最小二乘法表面法线估计--------------------------
pcl::LinearLeastSquaresNormalEstimation<pcl::PointXYZ, pcl::Normal> n;
n.setInputCloud(cloud); // 输入点云
n.setDepthDependentSmoothing(true); // 设置是否使用深度平滑
n.setNormalSmoothingSize(10.0f); // 计算对象边界的深度变化阈值
n.setMaxDepthChangeFactor(0.02f); // 平滑法线的区域大小(窗口大小)
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
n.compute(*normals); // 计算法向量
pcl::io::savePCDFileASCII("../../data/normal.pcd", *normals);
// -------------------------------结果展示-----------------------------------
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Normal viewer"));
//viewer->initCameraParameters();//设置照相机参数,使用户从默认的角度和方向观察点云
//设置背景颜色
viewer->setBackgroundColor(0.3, 0.3, 0.3);
viewer->addText("faxian", 10, 10, "text");
//设置点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 0, 225, 0);
//添加坐标系
viewer->addCoordinateSystem(0.1);
viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud");
//添加需要显示的点云法向。cloud为原始点云模型,normal为法向信息,20表示需要显示法向的点云间隔,即每20个点显示一次法向,0.02表示法向长度。
viewer->addPointCloudNormals<pcl::PointXYZ, pcl::Normal>(cloud, normals, 20, 0.02, "normals");
//设置点云大小
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "sample cloud");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return 0;
}
关键点说明
法线估计方法:
- 使用线性最小二乘法拟合局部平面,然后计算该平面的法线
- 适合处理有序点云(如来自深度相机)
参数设置:
DepthDependentSmoothing: 在深度变化大的区域减少平滑NormalSmoothingSize: 控制法线计算的邻域大小MaxDepthChangeFactor: 用于检测边界,避免跨边界计算法线
可视化:
- 同时显示原始点云和法线
- 法线显示间隔和长度可调,避免过于密集
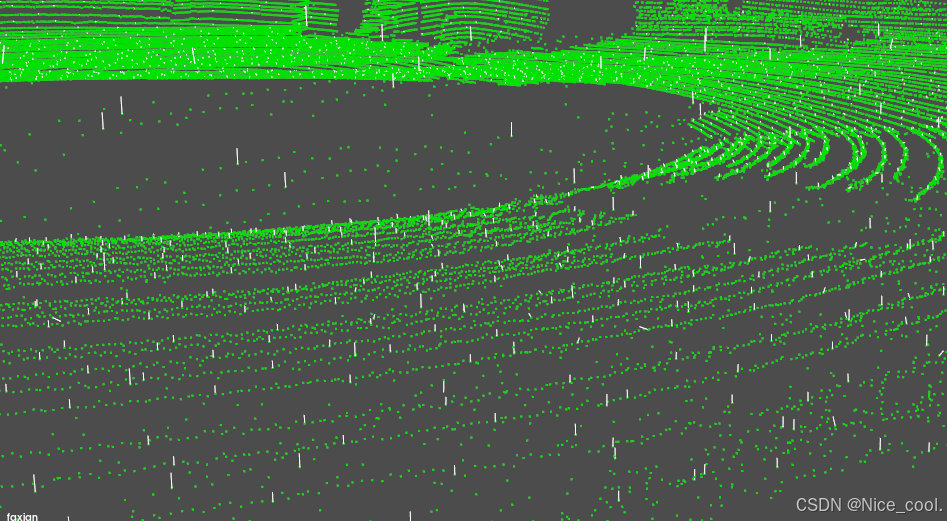
效果

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)