点云数据处理合集(一)点云数据集及获取
点云数据集及获取
·
点云获取方式:
1.激光扫描仪(time-of-flight)
(1)星载:卫星
(2)机载:飞机,无人机
无人机上配置GPS或IMU,可获取大范围的点云,可达10cm 精度,适用于大尺度测绘(城市级 别)、DEM、正射影像(高精度相机)
(3)地面:三脚架上固定
扫描仪固定在三脚架上,进行较大范围的扫描获取点云,可达mm精度,距离可达400m,1s采集200万点云,适用于文物三维扫描建模和地形测量
(4)移动:车辆、机器人
跟着移动物体进行较大范围获取点云,可达cm精度,距离可达240m,1s采集200万点云,适用无人车、机器人和街景测量
2.深度相机
通过红外激光器把光线投影到物体上,通过红外摄像头采集得到深度信息,主动光源,夜晚可使用但观测距离和范围有限,适用室内机器人和AR\VR
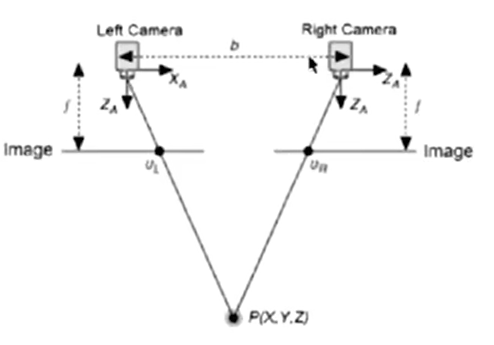
3.双目相机(可以进行三角测量计算物体距离)
使用两个相机从不同位置获取物体的图像,通过三角计算,可得到物体的点云三维坐标。
4.光学相机多视角重建
SFM运动结构恢复
给出多幅图像及图像特征点的对应集合,估计3D点的位置和摄像机姿态(运动)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)