安川机器人焊枪切换设定方法_安川机器人调试之:TCP的建立
·
TCP(Tool Center Point)作为机器人工具的重要属性,在系统前期的配置中非常的重要,一个精度很高的TCP,对我们的示教工作是很有帮助的。那么,安川机器人的TCP是如何建立的呢,本篇文章来给大家做详细的讲解。
1、将“安全模式”设定为“管理模式”,设定的步骤在前面的文章中我们已做介绍,在此不做赘述。
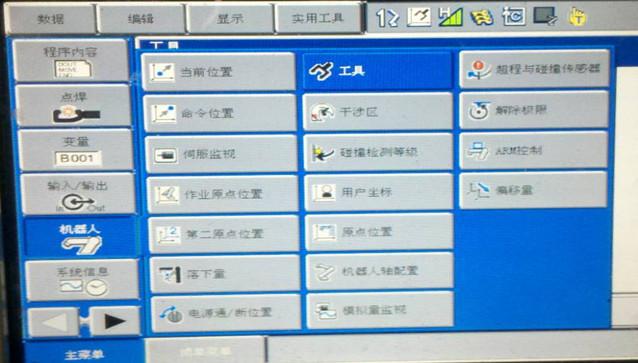
2、在主菜单中选择【机器人】,再按【工具】进入下一界面
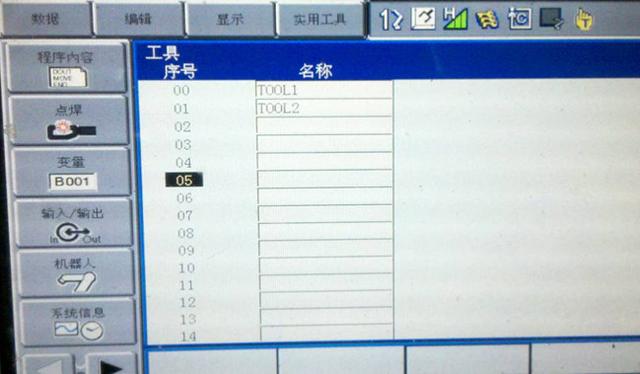
3、在【工具】界面中(现在以在第五个工具序号中设置工具坐标为例),将光标移到‘05’,按示教器上的【回车】键进入下一界面
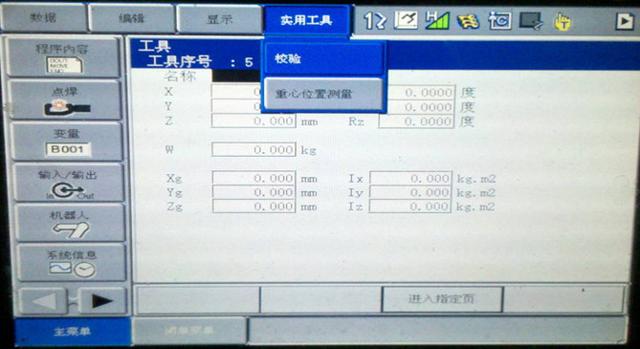
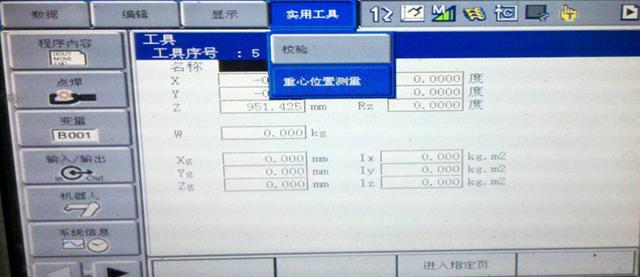
4、在05号工具坐标界面中,按屏幕中上方的【实用工具】,再选择【校验】进入下一界面
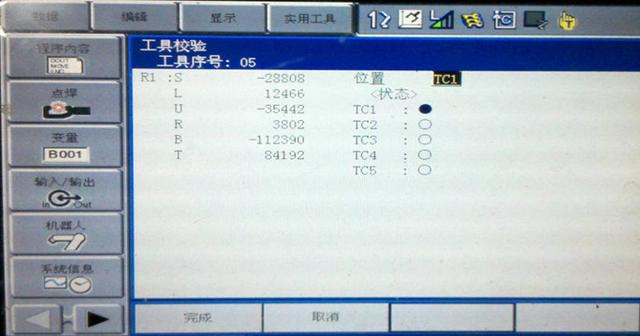
5、在‘位置’处选择TC1,将机器焊枪头示教到TC1点
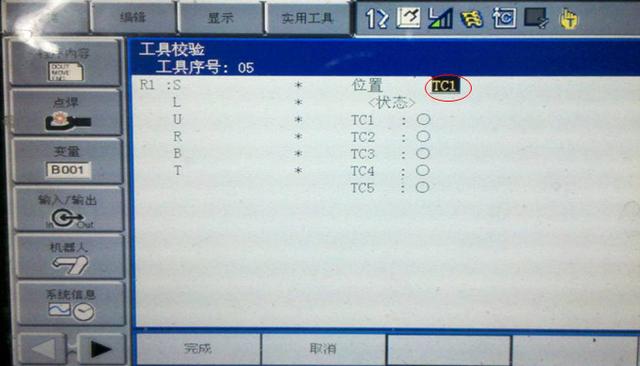

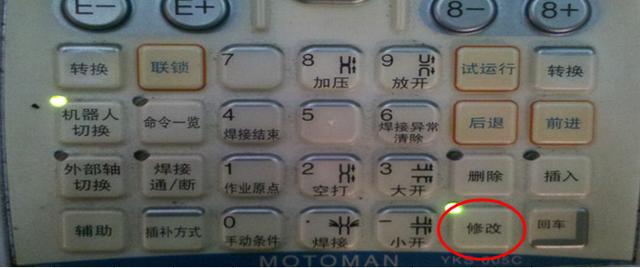
6、按亮示教器上的【修改】键,再按【回车】,TC1点记录完成。
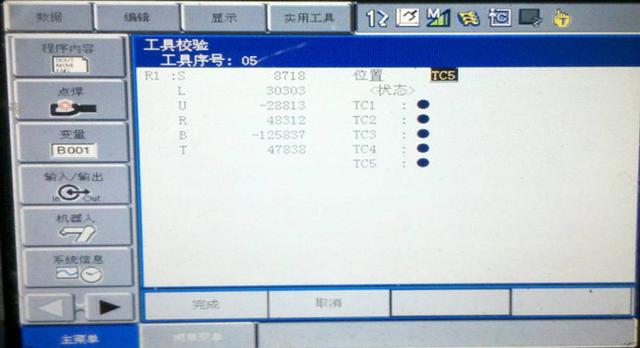
7、同样的方法做TC2、TC3、TC4、TC5四点。完成后按屏幕左下脚的【完成】,进入下一界面
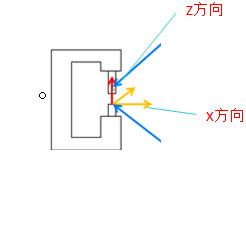
8、设TCP的X、Y、Z方向,Rx、Ry、Rz为0度是机器人出厂时的TCP角度,通过设置Rx、Ry、Rz的度数,使TCP的X、Y、Z方向达到理想状态。
以上便是安川机器人TCP的创建步骤,欢迎大家评论交流

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)