移动机器人路径规划(2)——Hybrid_Astar
最左边为普通Astar的扩展,每个点落在九宫格中间,一一对应图像格式的PGM地图中的每个图像像素点,最右边则是HybridAstar的扩展方式,其落点随机,无法通过将点的位置转换为对应的图像像素点,这也就意味着HybridAstar的搜索,必然是直接在世界坐标系下的搜索。在倒车的情况下,处理类似,但还增加了倒车的惩罚因子。总体来说,根据移动方向和转向变化情况,结合不同的惩罚系数,计算出实际的行进代
前言
初次接触HybridAstar,会感觉比起其他的规划算法,HybridAstar好像复杂了一点,但后面才发现其实也只是Astar的优化升级版本,但是更适用于实际的移动机器人规划,Hybrid_astar是一种考虑机器运动学(转弯半径、车辆运动模型等)的非完整约束的全局路径规划算法。
算法流程
传统Astar搜索和考虑车辆运动约束搜索的区别:
Astar:只需要将搜索空间进行栅格化,然后按照栅格坐标去扩展路径,即只需要考虑X,Y;
考虑车辆运动约束搜索:需要考虑车辆的坐标(X,Y)、车头朝向(决定下一时刻可搜索方向)、转弯半径(决定可到达点);
graph TD
A[初始化地图参数] --> B[设置起点/终点节点]
B --> C{开放集是否空?}
C -->|否| D[取出最优节点]
D --> E[Reeds-Shepp直连检查]
E -->|成功| F[返回路径]
E -->|失败| G[生成邻居节点]
G --> H[碰撞检测]
H -->|通过| I[计算G/H代价]
I --> J[更新开放集]
J --> C
C -->|是| K[搜索失败]
subgraph 节点处理
D -->|扩展| G
G -->|多方向| H
I -->|代价更新| J
end
subgraph 路径生成
E -->|最终连接| F
F --> L[回溯父节点]
L --> M[生成路径序列]
endAstar的核心部分在于两部分:- 下一个节点的搜索策略;
- 引入启发函数的代价函数设计。
针对Astar的一些改进,要么是改进代价函数,要么是改进搜索策略。
节点搜索策略
Astar的搜索即九宫格策略,以当前位置为中心的九宫格中寻找下一个最可能的节点进行拓展;最后将拓展出的所有节点转换为世界坐标系下的点即可。
然而对于HybridAstar,则无法直接在图像格式的PGM地图中搜索,因为HybridAstar除了x,y坐标,为了符合机器人运动约束,需要引入机器人运动学模型,既然引入了运动学模型,必然涉及到角度,而一旦涉及到角度,这就意味着HybridAstar的搜索将不再是以地图中的每个点为下一个扩展点,其扩展点可能是任意位置,如下图所示:
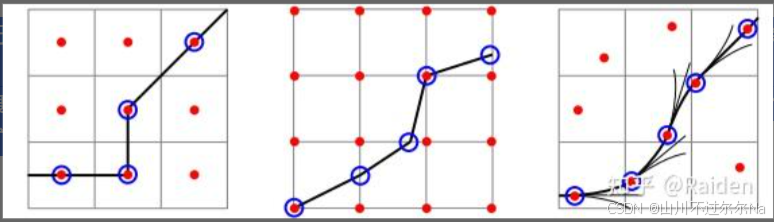
最左边为普通Astar的扩展,每个点落在九宫格中间,一一对应图像格式的PGM地图中的每个图像像素点,最右边则是HybridAstar的扩展方式,其落点随机,无法通过将点的位置转换为对应的图像像素点,这也就意味着HybridAstar的搜索,必然是直接在世界坐标系下的搜索。
那么对于Astar我们知道,在图像中搜索时,九宫格对应的拓展节点位置很容易获得,对当前位置的像素x,y坐标进行加一减一即可,那么对于世界坐标系下的HybridAstar,如何获取下一个节点的坐标呢?HybridAstar的搜索目的是为了得到符合运动约束的路径,那么自然而然必然要引入运动学模型,所以理论上模型越符合机器人或者车辆运动特性,搜索出的路径也就更加匹配,这里给出代码里使用的一个简单模型(参考了开源库):
voidHybridAStar::DynamicModel(constdouble&step_size,constdouble&phi,
double&x,double&y,double&theta)const{
x=x+step_size*std::cos(theta);
y=y+step_size*std::sin(theta);
theta=Mod2Pi(theta+step_size/wheel_base_*std::tan(phi));
}当然搜索过程存在避障问题,Astar避障很容易,只要把图像中障碍物的节点过滤掉就可以,但是既然HybridAstar是要符合机器人或者车辆运动学约束的,那么避障就稍微复杂一点,但其实也不难,以一个机器人或者车辆为例,提取物体的外接四边形,然后判断四条边是否有膨胀即可(对于PGM地图则是将坐标转换为图像坐标并判断四条边是否碰撞),任何一条边碰到了障碍物则节点不可取。当然在判断边的碰撞的时候其实也是取边上的点进行判断。
inlineboolHybridAStar::LineCheck(doublex0,doubley0,doublex1,doubley1){
boolsteep=(std::abs(y1-y0)>std::abs(x1-x0));
//LineCheck使用Bresenham算法检查两点间直线是否有障碍物参数:两点的坐标返回:布尔值是否有障碍物
if(steep){
std::swap(x0,y0);
std::swap(y1,x1);
}
if(x0>x1){
std::swap(x0,x1);
std::swap(y0,y1);
}
autodelta_x=x1-x0;
autodelta_y=std::abs(y1-y0);
autodelta_error=delta_y/delta_x;
decltype(delta_x)error=0;
decltype(delta_x)y_step;
autoyk=y0;
if(y0<y1){
y_step=1;
}else{
y_step=-1;
}
autoN=static_cast<unsignedint>(x1-x0);
for(unsignedinti=0;i<N;++i){
if(steep){
if(HasObstacle(Vec2i(yk,x0+i*1.0))
||BeyondBoundary(Vec2d(yk*MAP_GRID_RESOLUTION_,
(x0+i)*MAP_GRID_RESOLUTION_))
){
returnfalse;
}
}else{
if(HasObstacle(Vec2i(x0+i*1.0,yk))
||BeyondBoundary(Vec2d((x0+i)*MAP_GRID_RESOLUTION_,
yk*MAP_GRID_RESOLUTION_))
){
returnfalse;
}
}
error+=delta_error;
if(error>=0.5){
yk+=y_step;
error=error-1.0;
}
}
returntrue;
}
boolHybridAStar::CheckCollision(constdouble&x,constdouble&y,constdouble&theta)
{
//检查车辆在某个位姿下是否与障碍物碰撞,通过车辆轮廓变换后检测各边是否与障碍物相交。
//参数:车辆位置以及朝向
Timertimer;
Mat2dR;
R<<std::cos(theta),-std::sin(theta),
std::sin(theta),std::cos(theta);
MatXdtransformed_vehicle_shape;
transformed_vehicle_shape.resize(8,1);
for(unsignedinti=0;i<4u;++i){
transformed_vehicle_shape.block<2,1>(i*2,0)
=R*vehicle_shape_.block<2,1>(i*2,0)+Vec2d(x,y);
}
Vec2itransformed_pt_index_0=Coordinate2MapGridIndex(
transformed_vehicle_shape.block<2,1>(0,0)
);
Vec2itransformed_pt_index_1=Coordinate2MapGridIndex(
transformed_vehicle_shape.block<2,1>(2,0)
);
Vec2itransformed_pt_index_2=Coordinate2MapGridIndex(
transformed_vehicle_shape.block<2,1>(4,0)
);
Vec2itransformed_pt_index_3=Coordinate2MapGridIndex(
transformed_vehicle_shape.block<2,1>(6,0)
);
doubley1,y0,x1,x0;
//pt1->pt0
x0=static_cast<double>(transformed_pt_index_0.x());
y0=static_cast<double>(transformed_pt_index_0.y());
x1=static_cast<double>(transformed_pt_index_1.x());
y1=static_cast<double>(transformed_pt_index_1.y());
if(!LineCheck(x1,y1,x0,y0)){
returnfalse;
}
//pt2->pt1
x0=static_cast<double>(transformed_pt_index_1.x());
y0=static_cast<double>(transformed_pt_index_1.y());
x1=static_cast<double>(transformed_pt_index_2.x());
y1=static_cast<double>(transformed_pt_index_2.y());
if(!LineCheck(x1,y1,x0,y0)){
returnfalse;
}
//pt3->pt2
x0=static_cast<double>(transformed_pt_index_2.x());
y0=static_cast<double>(transformed_pt_index_2.y());
x1=static_cast<double>(transformed_pt_index_3.x());
y1=static_cast<double>(transformed_pt_index_3.y());
if(!LineCheck(x1,y1,x0,y0)){
returnfalse;
}
//pt0->pt3
x0=static_cast<double>(transformed_pt_index_0.x());
y0=static_cast<double>(transformed_pt_index_0.y());
x1=static_cast<double>(transformed_pt_index_3.x());
y1=static_cast<double>(transformed_pt_index_3.y());
if(!LineCheck(x0,y0,x1,y1)){
returnfalse;
}
check_collision_use_time+=timer.End();
num_check_collision++;
returntrue;
}代价函数设计
Astar的代价函数分为两部分:启发函数 h(x) ,与距离起点的代价 g(x) ,当然Astar其实是额外引入了启发函数。对于Astar的启发函数设计,通常是利用当前点到终点的距离,或是曼哈顿距离,或是欧式距离等等,距离起点的代价则是在搜索过程中一步步更新的。而至于HybridAstar的代价函数设计,同样是这两部分,当然各有改进。
启发函数 h(x):
有了当前的位置信息 x,y,θ 以及设定好的一些参数,即可计算出扩展节点的坐标,这便是重写了Astar的节点搜索策略。但是不止于此,HybridAstar在搜索的时候,使用了Reeds-Shepp路径用于启发式估计,直接调用Reeds-Shepp路径库计算理论最短路径长度,并且设置了一个阈值,shot_distance_阈值:在距离目标3倍终局距离时触发Reeds-Shepp计算,并且分层启发式设计:远距离用L1/L2加速搜索,近距离用Reeds-Shepp提高精度,在搜索时如果可以搜索到当前位置到终点的曲线,则可以结束搜索。
doubleHybridAStar::ComputeH(constStateNode::Ptr¤t_node_ptr,
constStateNode::Ptr&terminal_node_ptr){
doubleh;
//L2
//h=(current_node_ptr->state_.head(2)-terminal_node_ptr->state_.head(2)).norm();
//L1
h=(current_node_ptr->state_.head(2)-terminal_node_ptr->state_.head(2)).lpNorm<1>();
if(h<3.0*shot_distance_){
h=rs_path_ptr_->Distance(current_node_ptr->state_.x(),current_node_ptr->state_.y(),
current_node_ptr->state_.z(),
terminal_node_ptr->state_.x(),terminal_node_ptr->state_.y(),
terminal_node_ptr->state_.z());
}
returnh;
}//是启发式函数,估计当前节点到目标的代价,使用Reeds-Shepp路径长度或欧氏距离。距离起点的代价 g(x):
对于距离起点的代价,我们知道Astar比较简单,在图像中搜索时,每次像素加一或是减一的过程中对于起点的距离也随之更新了,但是HybridAstar在世界坐标系下进行搜索,它考虑了不同的移动方向和转向变化等因素,可能涉及到路径的转向惩罚和倒车惩罚。分成了两个大方向:FORWARD(前进)和BACKWARD(倒车)。每个方向下又有不同的情况判断,特别是转向是否变化,以及转向等级是否为0。在FORWARD的情况下,如果转向等级不同,即邻居节点的转向等级和当前节点不一致,这时候可能需要应用转向变化的惩罚。例如,如果邻居的转向等级是0,也就是直行,那么可能惩罚较小,而如果有转向的话,惩罚会更大。另外,如果转向等级相同,则根据是否是直行来决定是否添加转向惩罚。转向等级为0可能意味着直行,没有转向,所以没有额外的惩罚,否则会有转向惩罚。
在倒车的情况下,处理类似,但还增加了倒车的惩罚因子。无论转向是否变化,倒车本身就有惩罚,再加上转向变化的惩罚和转向的惩罚。例如,如果倒车时转向等级改变,并且新的转向等级是0,那么惩罚是段长度乘以转向变化惩罚乘以倒车惩罚。如果是转向等级非0,那么还要再乘以转向惩罚。
总体来说,根据移动方向和转向变化情况,结合不同的惩罚系数,计算出实际的行进代价,从而在搜索过程中选择更合适的路径,避免不必要的转向和倒车,使生成的路径更符合实际车辆的操控需求。
doubleHybridAStar::ComputeG(constStateNode::Ptr¤t_node_ptr,
constStateNode::Ptr&neighbor_node_ptr)const
{
doubleg;
//判断邻居节点运动方向(前进/倒车)
if(neighbor_node_ptr->direction_==StateNode::FORWARD)
{
//转向角度是否变化
if(neighbor_node_ptr->steering_grade_!=current_node_ptr->steering_grade_){
//新转向是否为直行(steering_grade=0)
if(neighbor_node_ptr->steering_grade_==0){
g=segment_length_*steering_change_penalty_;//直行转向惩罚
}
else{
g=segment_length_*steering_change_penalty_*steering_penalty_;//转向变化+转向惩罚
}
}
else{
//保持原转向角度
if(neighbor_node_ptr->steering_grade_==0){
g=segment_length_;//直行无惩罚
}
else{
g=segment_length_*steering_penalty_;//固定转向惩罚
}
}
}
else{//倒车方向
if(neighbor_node_ptr->steering_grade_!=current_node_ptr->steering_grade_){
if(neighbor_node_ptr->steering_grade_==0){
g=segment_length_*steering_change_penalty_*reversing_penalty_;//倒车转向变化惩罚
}
else{
g=segment_length_*steering_change_penalty_*steering_penalty_*reversing_penalty_;
}
}
else{
if(neighbor_node_ptr->steering_grade_==0){
g=segment_length_*reversing_penalty_;//倒车直行惩罚
}
else{
g=segment_length_*steering_penalty_*reversing_penalty_;//倒车转向惩罚
}
}
}
returng;
}Hybrid_A_star
参考资料:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 18
18 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)