无人机目标跟踪数据集
分享一些常用的无人机目标跟踪数据集
无人机目标跟踪,一般也叫“反无人机跟踪”,是指地面人员对空中的无人机目标进行跟踪的方法,要区别一下另一种无人机跟踪,也叫“空域跟踪”(Aerial tracking),是指无人机视角对地面目标的跟踪,例如数据集UAV123。这篇文章主要分享反无人机跟踪的主要数据集,空域跟踪的放在其它文章介绍。
Anti-UAV410
当前最大的无人机目标跟踪数据集依托于Anti-UAV比赛,当前已成功举办三届,第四届正在举办。分别依托于CVPR 2020, ICCV 2021,CVPR 2023和CVPR2025,大赛官网如下
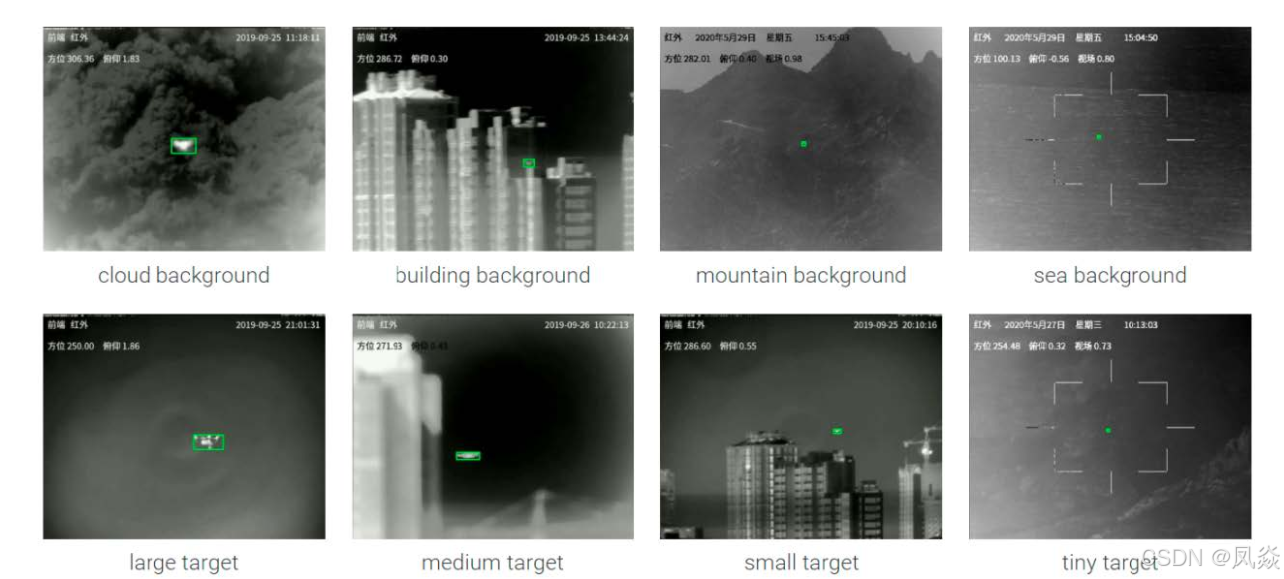
其使用的数据集为Anti-UAV410数据集,现发表在TPAMI2024期刊上(Anti-UAV410: A Thermal Infrared Benchmark and Customized Scheme for Tracking Drones in the Wild | IEEE Journals & Magazine | IEEE Xplore),包含410个红外单模态无人机序列,包含多种场景,如下图所示。
GitHub - HwangBo94/Anti-UAV410: The benchmark of AntiUAV410.
 Anti-UAV
Anti-UAV
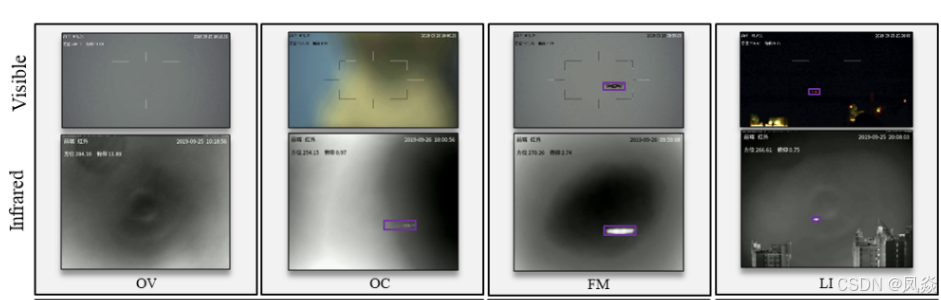
早期的anti-uav比赛(前三届)使用的数据集是双模态的无人机跟踪数据集,这里与Anti-UAV410做区分,采用RGB-T图像对的形式来克服单个类型视频的缺点,包含了318个视频对。
[2101.08466] Anti-UAV: A Large Multi-Modal Benchmark for UAV Tracking (arxiv.org)
其评价指标也与一般的目标跟踪有所区别(所谓的Precision score和Success score),采用的是一种新的准确度计算方法,具体可参考大赛官网。

Anti-UAV(DUT)
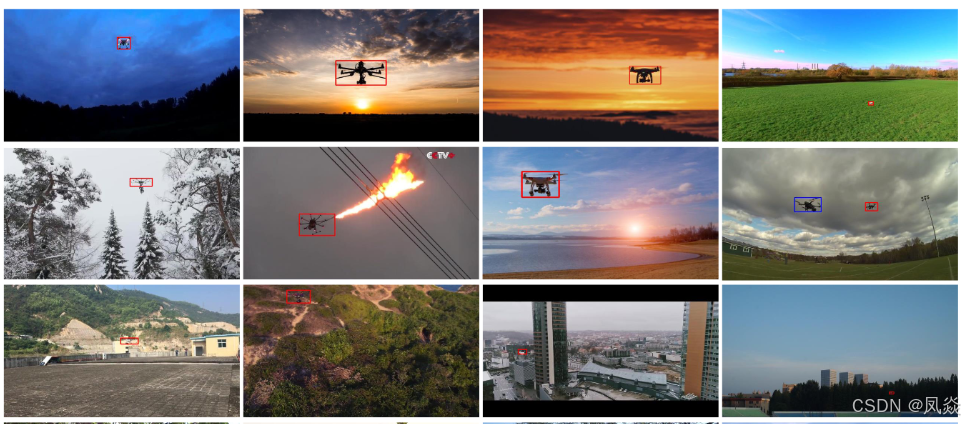
这个数据集也叫Anti-UAV,但与上述的Anti-UAV大会使用的有所区别,该数据集是大连理工大学的团队公开的数据集,该数据集为可见光单模态的数据集, 只有20个序列,但因为拍摄原因抖动很厉害,个人认为比上面两个难不少。
[2205.10851] Vision-based Anti-UAV Detection and Tracking (arxiv.org)
GitHub - wangdongdut/DUT-Anti-UAV

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 28
28 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)