机器人运动学及轨迹规划— (8) 旋转矩阵到欧拉角、四元数的转换
·
前言
本文给出了旋转矩阵到欧拉角、四元数的matlab代码。针对旋转矩阵到欧拉角、四元数转换的奇异性做阈值处理和最大值判定,以保证机器人运动控制插补过程的稳定性。
1、旋转矩阵转欧拉角
旋转矩阵转换为欧拉角在机器人运动学中,刚体坐标系的变换通常都是通过旋转矩阵进行表示,而在用户窗口则是通过欧拉角显示,而欧拉角存在旋转顺序不同、万向锁等问题。目前KUKA、ABB机器人欧拉角旋转顺序均为ZYX,因此默认欧拉角旋转顺序为ZYX。当B=±90°时,万向锁会导致失去一个自由度,即A和C的角度无法唯一确定,在机器人运动控制过程中会发生突变。
因此,通过阈值判定处理,当B接近±90°时,即|cos(B)|<10^(-6)时,对欧拉角进行特殊处理,代码如下。
% 定义末端位姿矩阵
% 机器人关节角度为[60°,-25°,40°,45°,-20°,60°]
T06=[-0.6992 0.1693 0.6946 385
0.6781 -0.1505 0.7194 625.7
0.2263 0.9740 -0.0096 983.9
0 0 0 1 ];
% 机器人关节角度为[0°,0°,0°,0°,0°,0°]
% T06=[0 0 1 1030
% 0 1 0 0
% -1 0 0 1260
% 0 0 0 1 ];
r11=T06(1,1);r12=T06(1,2);r13=T06(1,3);
r21=T06(2,1);r22=T06(2,2);r23=T06(2,3);
r31=T06(3,1);r32=T06(3,2);r33=T06(3,3);
% 计算B
B=atan2(-r31,sqrt(r32*r32+r33*r33));
% 判定abs(cos(B))的阈值
if((abs(cos(B))<0.000001))
A=0;
C=atan2(r32, r33);
else
A=atan2(r21, r11);
C=atan2(r32, r33);
end
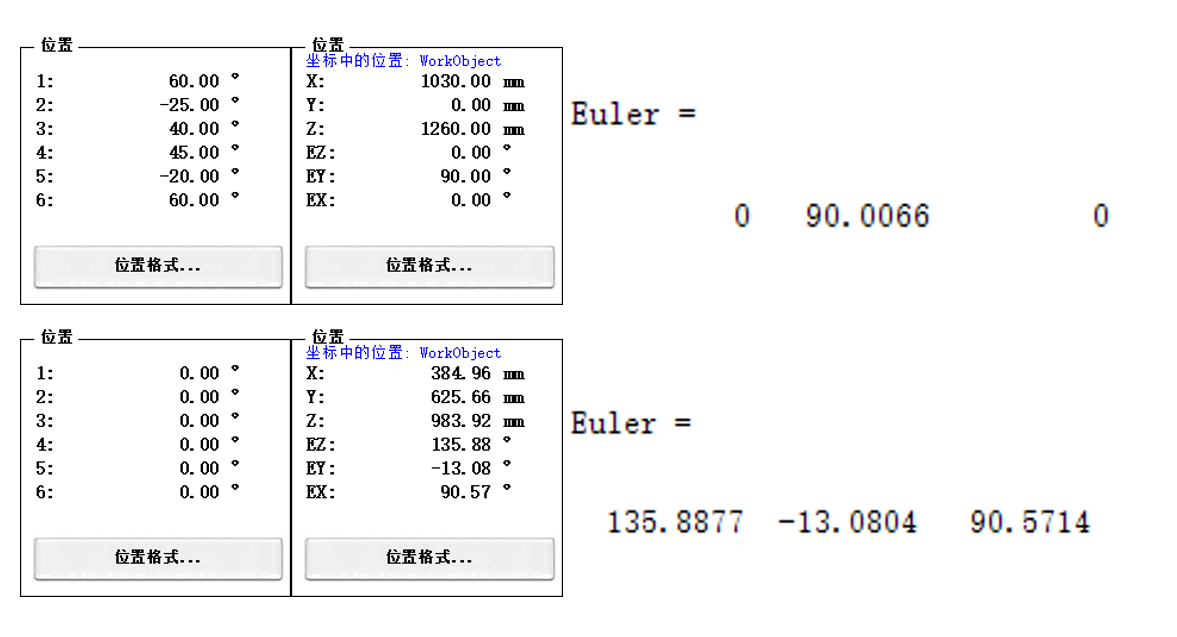
Euler=[A B C]*57.3;机器人关节角度分别为[60°, -25°, 40°, 45°, -20°, 60°] 和[0°, 0°, 0°, 0°, 0°, 0°]时,matlab计算数值与ABB机器人对比如下:
2、旋转矩阵转四元数
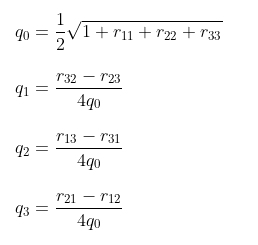
旋转矩阵到四元数的转换公式如下,在转换过程中,分母为0或者值非常小,会导致四元数求解不稳定,因此需要先比较筛选出最大值,再进行计算。
% 定义末端位姿矩阵
% 机器人关节角度为[60°,-25°,40°,45°,-20°,60°]
T06=[-0.6992 0.1693 0.6946 385
0.6781 -0.1505 0.7194 625.7
0.2263 0.9740 -0.0096 983.9
0 0 0 1 ];
% 机器人关节角度为[0°,0°,0°,0°,0°,0°]
%T06=[0 0 1 1030
% 0 1 0 0
% -1 0 0 1260
% 0 0 0 1 ];
r11=T06(1,1);r12=T06(1,2);r13=T06(1,3);
r21=T06(2,1);r22=T06(2,2);r23=T06(2,3);
r31=T06(3,1);r32=T06(3,2);r33=T06(3,3);
% 筛选四个元素最大值
W=r11+r22+r33;
X=r11-r22-r33;
Y=r22-r11-r33;
Z=r33-r11-r22;
k=0;
value=W;
if(X>value)
value=X;
k=1;
end
if(Y>value)
value=Y;
k=2;
end
if(Z>value)
value=Z;
k=3;
end
% 以最大值为分母计算四元数
max=sqrt((value+1))/2;
switch(k)
case 0
q1=max;
q2=(r32-r23)/4/max;
q3=(r13-r31)/4/max;
q4=(r21-r12)/4/max;
case 1
q1=(r32-r23)/4/max;
q2=max;
q3=(r21+r12)/4/max;
q4=(r13+r31)/4/max;
case 2
q1=(r13-r31)/4/max;
q2=(r12+r21)/4/max;
q3=max;
q4=(r23+r32)/4/max;
case 3
q1=(r21-r12)/4/max;
q2=(r31+r13)/4/max;
q3=(r23+r32)/4/max;
q4=max;
end
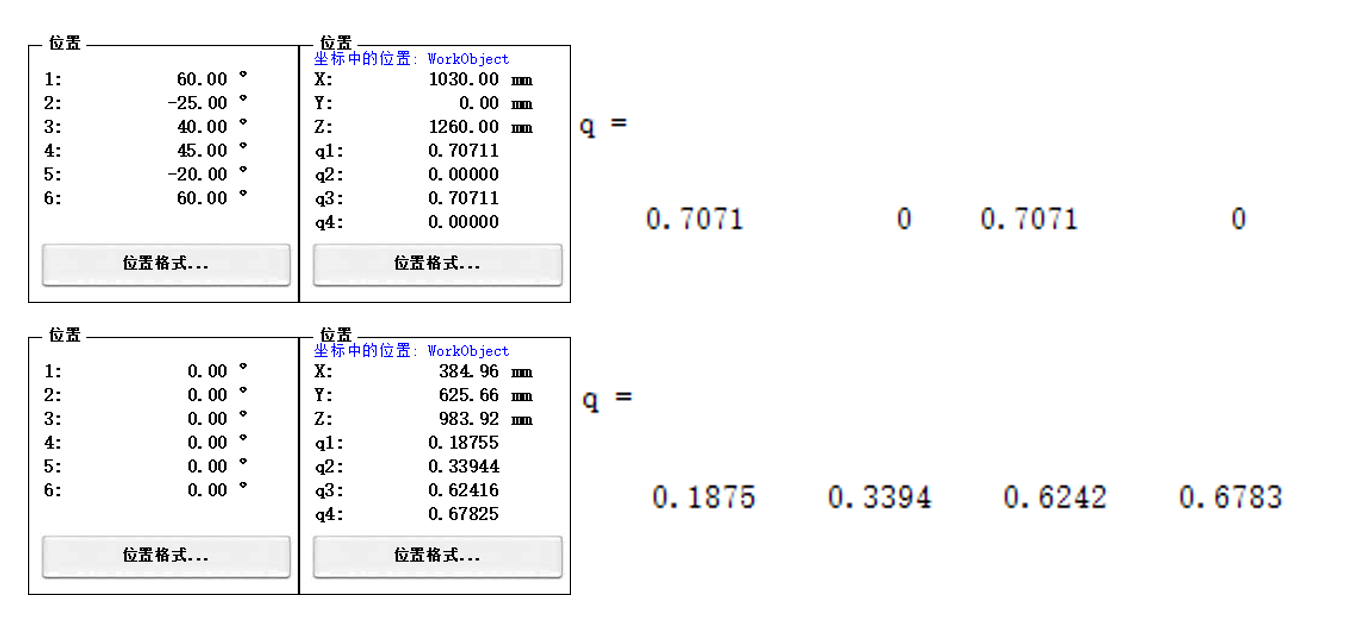
q=[q1 q2 q3 q4];matlab计算数值与ABB机器人对比如下:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)