kuka机器人profinet网络配置步骤_ABB机器人与西门子PLC连接Profinet通信(二)——机器人配置...
百万机器人
专注传播机器人知识
项目说明:
本次使用的博途软件为版本为V15.1,PLC为1214C,ABB机器人型号为IRB120,需要开通Profinet功能,机器人控制柜为IRC5。
主要目的:
实现ABB机器人和西门子PLC的Profinet通讯连接,使用PLC发送一个Q点信号,查看ABB机器人的输入信号是否有效。
本节要点:
本节主要完成的是ABB机器人端Profinet通信配置,主要包括IP地址、Profinet设备名称、通信字节设置等。

01
设置Profinet通讯:
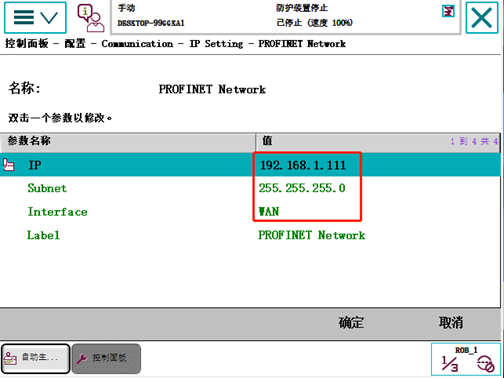
设置Profinet通讯,主要包含IP地址,子网掩码,Interface端口。
主要步骤:
依次点击示教器【控制面板】→【配置】→【主题】→【Communication】→【IP Setting】→【PROFINET Network】,进入界面如下图所示,设置IP为192.168.1.111,Interface选择WAN。然后点击确定,示教器界面提醒重启可以先选择“否”,等全部配置完成后统一重启,节省时间。
注意:若Interface使用WAN口时需要和机器人公共IP保持一致,机器人公共IP修改(【控制面板】→【控制器设置】→【网络】)
02
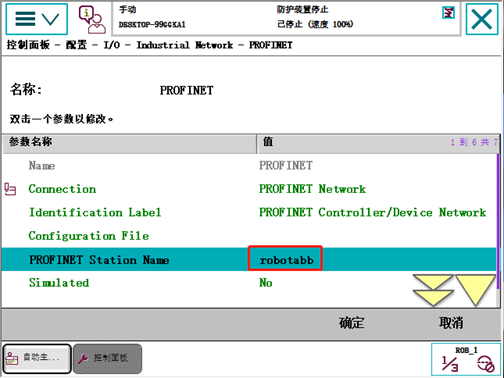
修改PROFINET设备名称:
主要步骤:
依次点击示教器【控制面板】→【配置】→【主题】→【I/O】→【IndustrialNetwork】→【PROFINET】,将名称修改成和PLC组态中的PROFINET设备名称一致,本次名称修改为“robotabb”。
03
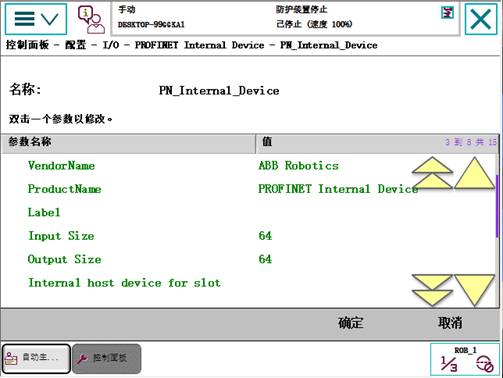
修改通讯字节长度:
主要步骤:
依次打开示教器【控制面板】→【配置】→【主题】→【I/O】→【PROFINET Internal Device】【PN_internal_Divice】设置字节数和PLC组态中设置的字节数保持一致。
END

热门推荐
1、西门子PLC与康耐视相机通讯配置(一)——相机配置
2、西门子PLC与康耐视相机通讯配置(二)——PLC配置
3、FANUC机器人初始零点数据
4、机器人四大家族小知识
5、DIY基于Arduino的智能小车(一)
6、KUKA机器人与西门子PLC连接Profinet通信(一)——PLC设置
7、ABB机器人与西门子PLC连接Profinet通信(一)——PLC配置


来都来了,点个“在看”再走吧
点赞+在看 

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)