GNSS说第(七)讲---自适应动态导航定位(一)---导航计算方法概述
今天开始,更新自适应导航定位系列博客,该系列博客参考书籍为杨元喜老师的《自适应动态导航定位》导航计算方法概述动态导航一般采用序贯算法或递推算法,如动态参数平差方法和滤波方法等。动态导航所涉及的信号一般分为两类,即随机信号和非随机信号。若采用平差方法进行导航计算,则可以将所有随机信号(包括观测的、模型推算的,以及统计已知的)均作为观测量,从而采用平差方法求得动态载体的导航解。这类平差方法包括参数加权
GNSS说第(七)讲—自适应动态导航定位(一)
今天开始,更新自适应导航定位系列博客,该系列博客参考书籍为杨元喜老师的《自适应动态导航定位》
导航计算方法
概述
动态导航一般采用序贯算法或递推算法,如动态参数平差方法和滤波方法等。动态导航所涉及的信号一般分为两类,即随机信号和非随机信号。若采用平差方法进行导航计算,则可以将所有随机信号(包括观测的、模型推算的,以及统计已知的)均作为观测量,从而采用平差方法求得动态载体的导航解。这类平差方法包括参数加权平差,序贯平差,动态平差、贝叶斯估计等。若将观测信息与随机参数信息区别对待,则可采用滤波方法。滤波方法包括标准Kalman滤波以及由此而发展起来的抗差滤波(也称稳健滤波或鲁棒滤波----Robust Filter)
序贯平差法
序贯平差法将每一历元的观测信息和动力学模型均作为观测信息。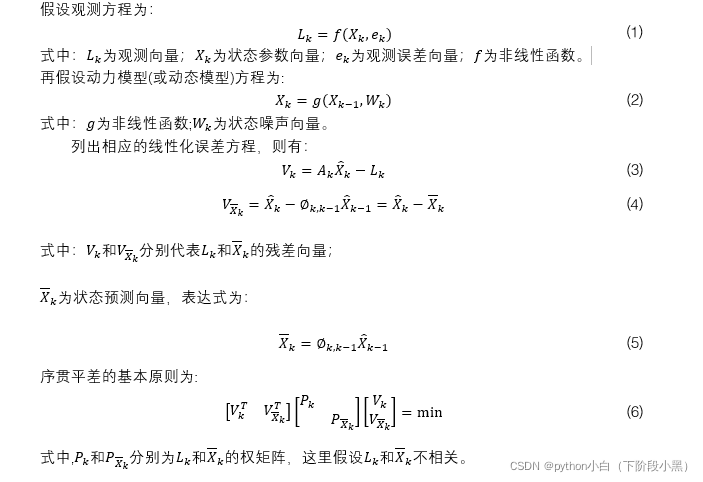
Kalman滤波法
Kalman滤波是目前动态导航中最常用的计算方法。1960年Kalman提出了离散系统滤波算法,后来又发展了连续系统的滤波方法,统称为Kalman滤波。
标准kalman滤波的极值条件为: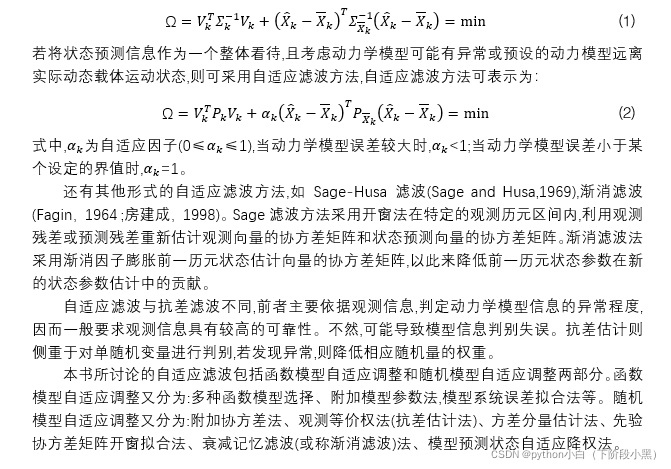
公式均为博主手动敲出,难免有误,恳请大家交流指正!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)