ESTUN TP(虚拟示教器)软件连接机器人控制器
ESTUN TP(虚拟示教器)软件连接机器人控制器
bricks.ini配置文件:
-
如果是单独的TP软件包直接访问根目录,打开TP(虚拟示教器)软件根目录,找到bricks.ini配置文件。
-
如果电脑端安装了Estun Editor,在C盘下的runtime文件夹下有一个TP-for-pc文件夹,该文件夹就是TP(虚拟示教器)软件,在TP-for-pc文件夹下,找到bricks.ini配置文件。
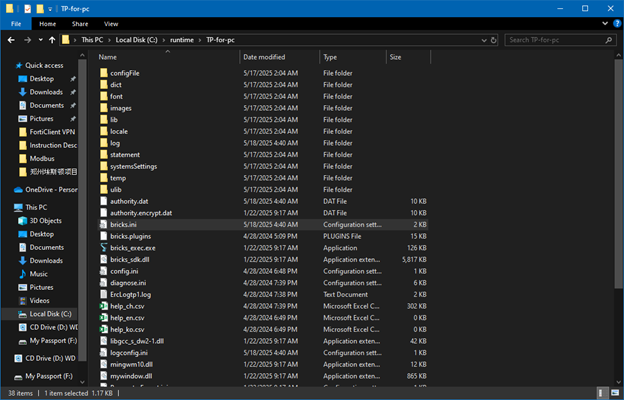
图1 bricks.ini配置文件目录
配置IP:
-
打开bricks.ini配置文件,修改INTIMEIP项的IP地址,和机器人控制器 LAN3 IP地址保持在同一个网段。
-
LAN3默认地址:192.168.60.68;LAN4默认地址:192.168.60.63。
-
如果不清楚机器人控制器IP地址,可以使用MobaXterm、CMD命令等扫描出机器人控制器的IP地址信息,这里不再赘述。
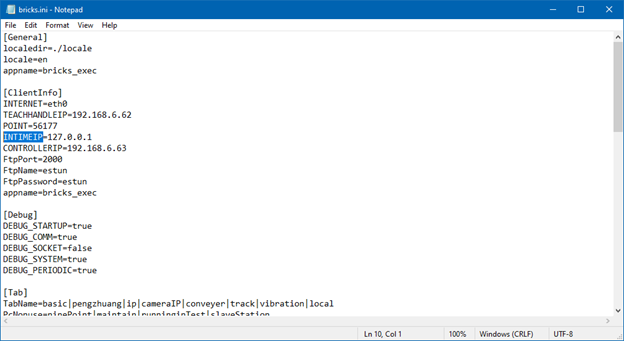
图2 修改INTIMEIP项的IP地址
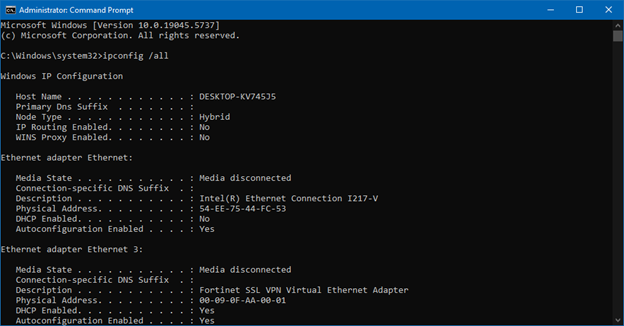
图3-1 使用cmd命令查询机器人控制器IP网段
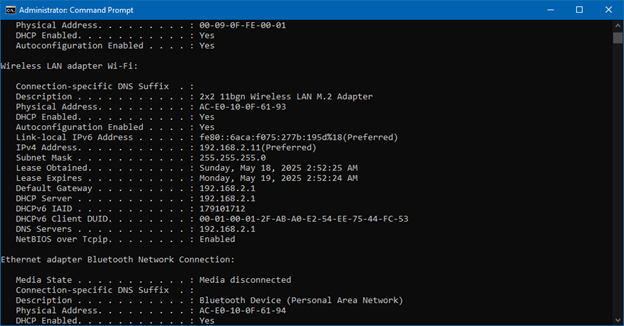
图3-2 使用cmd命令查询机器人控制器IP网段
连接机器人控制器:
-
配置好bricks.ini配置文件的INTIMEIP项IP地址后,打开bricks_exec.exe可执行文件,即可连接控制机器人实体控制器。

图4 Estun 虚拟示教器

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)