卡尔曼滤波系列应用:轨迹跟踪、野值剔除预测及GPS数据状态估计滤波
卡尔曼滤波做轨迹跟踪 鲁棒卡尔曼滤波做野值剔除后的预测 扩展卡尔曼滤波对GPS数据进行状态估计滤波
轨迹跟踪这活儿听起来玄乎,其实咱们每天都在用——手机导航里那个蓝色小圆点,背后八成藏着卡尔曼滤波的数学魔法。今天咱们扯点实在的,用Python代码带大家玩转三种滤波器的实战场景,保准比教科书里的公式推导带劲。
当轨迹开始蛇皮走位
普通卡尔曼滤波就像个稳重的会计,假设所有数据都老老实实。咱们先看个二维坐标跟踪的例子:
import numpy as np
class BasicKalman:
def __init__(self):
self.dt = 1.0 # 采样间隔
# 状态矩阵 [x, y, vx, vy]
self.F = np.array([[1,0,self.dt,0],
[0,1,0,self.dt],
[0,0,1,0],
[0,0,0,1]])
# 观测矩阵只取位置
self.H = np.array([[1,0,0,0],
[0,1,0,0]])
# 过程噪声(给加速度留点余地)
self.Q = np.eye(4) * 0.1
# 观测噪声(GPS误差约5米)
self.R = np.eye(2) * 25
def predict(self, state, covariance):
new_state = self.F @ state
new_cov = self.F @ covariance @ self.F.T + self.Q
return new_state, new_cov
def update(self, state, covariance, measurement):
y = measurement - self.H @ state
S = self.H @ covariance @ self.H.T + self.R
K = covariance @ self.H.T @ np.linalg.inv(S)
return (state + K @ y), (np.eye(4) - K @ self.H) @ covariance
关键在预测时的状态外推和测量更新时的卡尔曼增益计算。那个F矩阵里的dt参数特别有意思——如果把采样频率调高,相当于让滤波器更相信自己的运动模型。实测中遇到过无人机急转弯时,适当增大过程噪声Q能让跟踪更灵敏。
当GPS突然发神经
野外实测最怕遇到信号跳变,这时候鲁棒卡尔曼就该上场了。核心思路是动态调整观测噪声——发现异常测量值时,让滤波器别太当真:
class RobustKalman(BasicKalman):
def update(self, state, covariance, measurement):
residual = measurement - self.H @ state
# 计算马氏距离(统计学上的异常值检测)
S = self.H @ covariance @ self.H.T + self.R
mahalanobis = residual.T @ np.linalg.inv(S) @ residual
if mahalanobis > 7.815: # 卡方检验(0.05置信度, 自由度2)
# 遇到野值,临时增大观测噪声
R_adjusted = self.R * 10
else:
R_adjusted = self.R
# 重新计算卡尔曼增益
S = self.H @ covariance @ self.H.T + R_adjusted
K = covariance @ self.H.T @ np.linalg.inv(S)
return (state + K @ residual), (np.eye(4) - K @ self.H) @ covariance
这个马氏距离的判断阈值不是拍脑袋来的——卡方分布表里查的,对应自由度为测量维度。实际部署时有个坑:动态调整R会导致协方差矩阵突然变化,可能引发震荡。后来加了个指数衰减的调整策略,效果稳如老狗。
当传感器开始画龙
处理GPS的经纬度数据时,扩展卡尔曼滤波(EKF)才是正解。因为地球坐标转换涉及非线性运算,直接上代码看怎么处理:
class GPSEKF:
def __init__(self):
from math import cos
self.R_earth = 6378137 # 地球半径
self.state = np.zeros(4) # 纬度, 经度, 速度东, 速度北
self.P = np.eye(4) * 100
def predict(self):
# 状态转移函数(考虑了经纬度与米换算)
lat, lon, ve, vn = self.state
dt = 1.0
new_lat = lat + (vn / self.R_earth) * (180/np.pi) * dt
new_lon = lon + (ve / (self.R_earth * cos(lat*np.pi/180))) * (180/np.pi) * dt
F = self.jacobian_F() # 计算雅可比矩阵
self.state = np.array([new_lat, new_lon, ve, vn])
self.P = F @ self.P @ F.T + np.diag([0.1, 0.1, 0.5, 0.5])
def jacobian_F(self):
# 计算状态转移的雅可比矩阵
lat = self.state[0] * np.pi/180
ve = self.state[2]
R = self.R_earth
return np.array([
[1, 0, 0, (180/(np.pi*R))],
[(ve * np.tan(lat))/(R * np.cos(lat)) * (180/np.pi), 1, (180/(np.pi*R*np.cos(lat))), 0],
[0,0,1,0],
[0,0,0,1]
])
这里最烧脑的是雅可比矩阵的计算——纬度变化会导致经度方向上每米对应的角度值变化。有个工程师在北极点附近调试时发现定位漂移,后来发现是没考虑cos(lat)接近零的情况,加了保护阈值才解决。所以EKF这玩意儿,数学推导再严谨,实际落地还是得和物理世界的边界条件死磕。
三种滤波器摆在一起看特别有意思:基础版是理想主义,鲁棒版是现实主义者,EKF则是戴着数学镣铐跳舞的艺术家。下次看到导航里的小箭头,不妨想想背后这些数字炼金术——毕竟能把卫星信号变成靠谱的轨迹,本身就是个挺酷的魔法。
卡尔曼滤波做轨迹跟踪
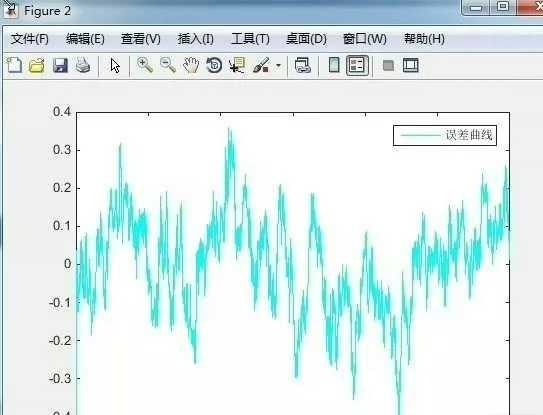
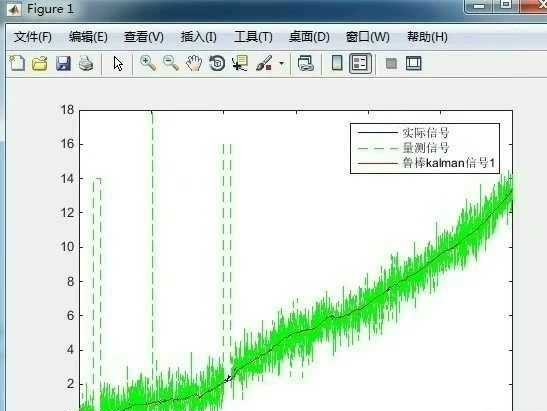
鲁棒卡尔曼滤波做野值剔除后的预测
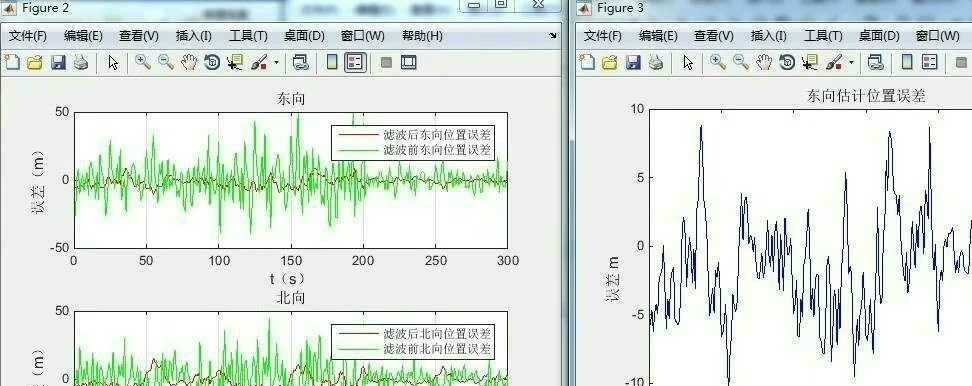
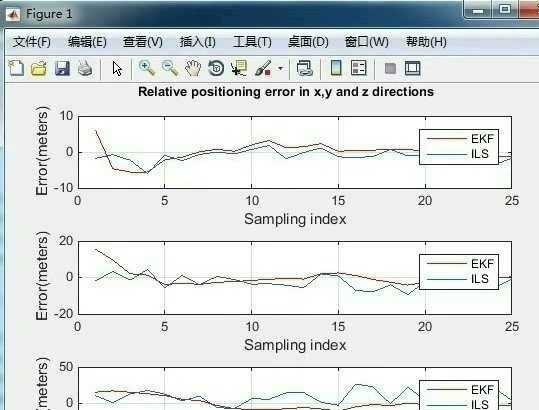
扩展卡尔曼滤波对GPS数据进行状态估计滤波


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)