K210芯片高清摄像头替换指南
将训练好的YOLOv8模型(.pt或.best文件)转换为K210芯片支持的.kmodel格式,需要通过模型量化、格式转换、兼容性适配等步骤。以下是详细的操作步骤和注意事项:
一、环境准备
-
安装依赖库:

-
下载工具链:
-
NNCase编译器:从GitHub Release下载对应操作系统的
nncase工具(如nncase-1.0.0.20220228.tgz)。 -
K210 SDK或MaixPy固件:确保固件支持目标模型输入尺寸。
-
二、转换步骤
步骤1:将YOLOv8模型导出为ONNX格式
-
使用YOLOv8官方导出脚本:

-
关键参数:
-
dynamic=True:允许动态输入尺寸(适配K210的灵活部署)。 -
simplify=True:简化模型结构(删除冗余算子)。
-
-
-
验证ONNX模型:

步骤2:使用NNCase将ONNX转换为KModel
-
生成校准数据集:
-
准备20-50张代表性图片(覆盖训练集场景),存放在
calib_dataset文件夹。 -
图片需缩放到模型输入尺寸(如
224x224)。
-
-
编写转换脚本(以Python为例):
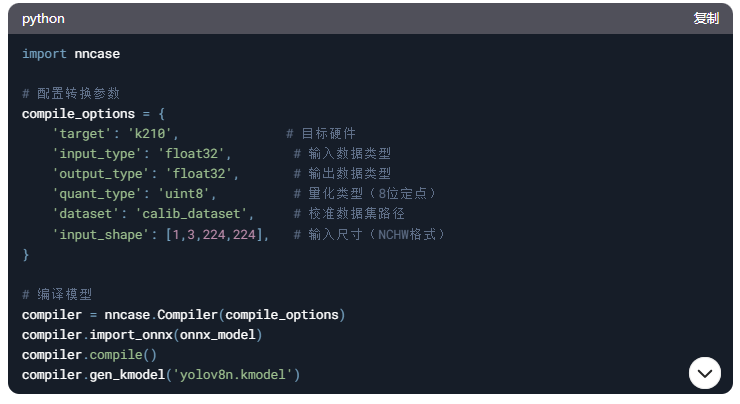
-
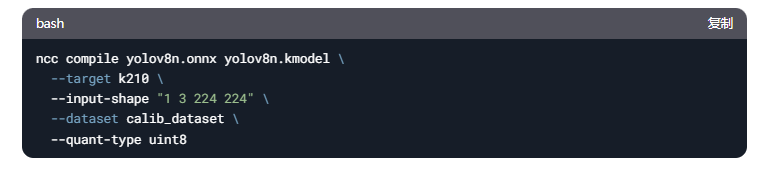
或使用命令行工具:
步骤3:验证KModel兼容性
-
在K210上测试模型(MaixPy示例):

步骤4:性能优化
-
量化策略调整:
-
若精度损失严重,尝试使用
--quant-type float16(但K210的KPU仅部分支持浮点)。 -
增大校准数据集多样性。
-
-
模型结构优化:
-
减少YOLO层输出通道数。
-
使用
Focus层替代大卷积(K210对Focus层支持较好)。
-
三、常见问题与解决
-
编译失败:不支持的算子
-
原因:KPU不支持某些算子(如
Slice、Reshape)。 -
解决:在导出ONNX前修改模型结构,或用
--no-optimize跳过算子融合。
-
-
推理结果异常
-
原因:输入尺寸/归一化方式不匹配。
-
解决:确保预处理与训练时一致(如归一化为
0-1或0-255)。
-
-
内存不足
-
原因:K210的6MB内存限制。
-
解决:降低输入分辨率(如从
320x320改为224x224)。
-
四、推荐工具与资源
-
NNCase官方文档:https://github.com/kendryte/nncase
-
MaixPy模型部署示例:https://github.com/sipeed/MaixPy_scripts
-
YOLOv8模型压缩工具:https://github.com/ultralytics/ultralytics
通过上述步骤,你可以将自定义YOLOv8模型高效部署到K210,结合高清摄像头提升边缘端检测性能。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)