差速转向机器人数学模型
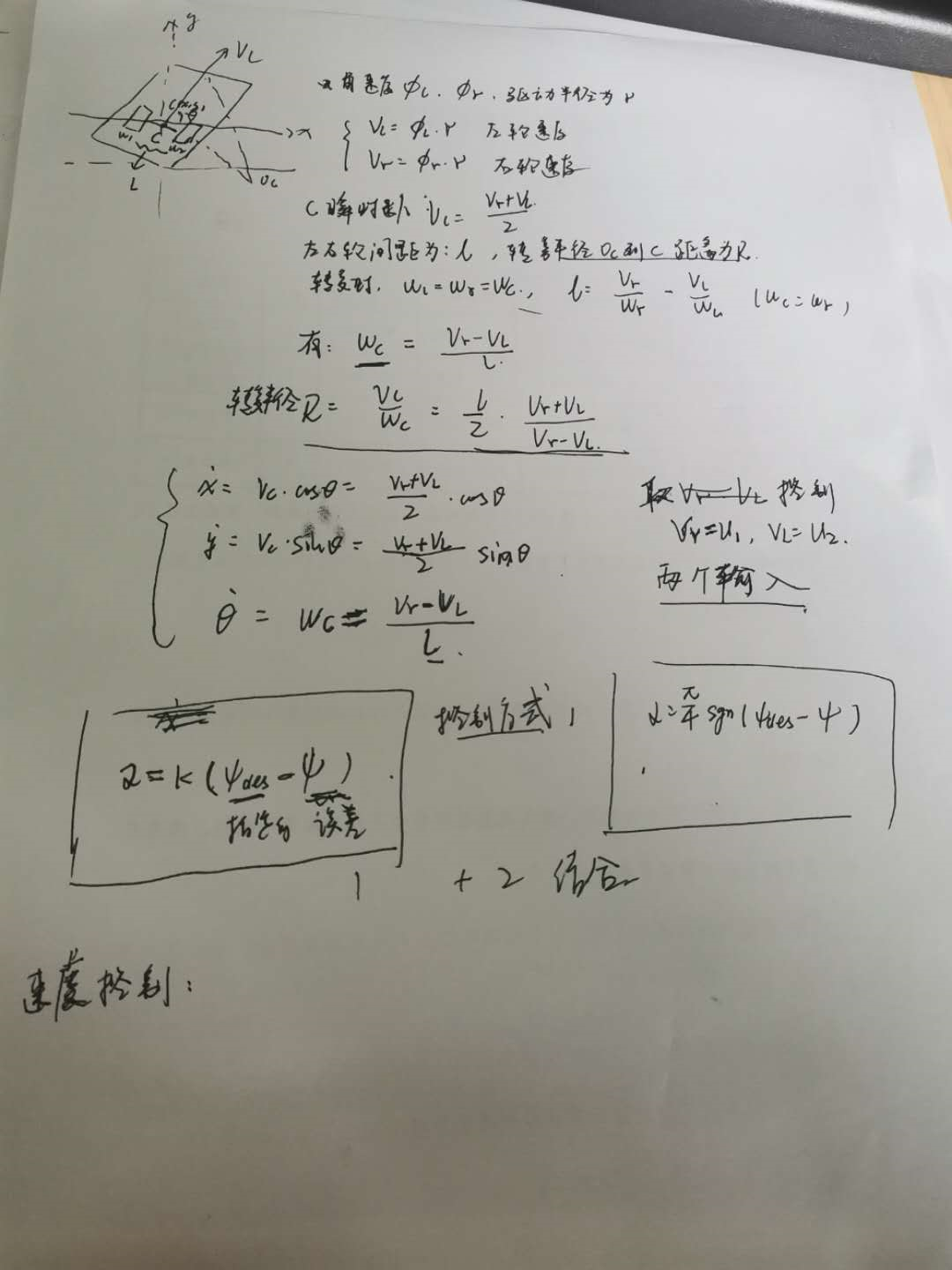
机器人控制方面有两种模型,一是自行车模型,二是差速模型,今天主要推导了差速模型,实验室的履带车都是差速模型。参考了https://blog.csdn.net/iProphet/article/details/83661753博文。假设电机输出的角速度为和,轮子驱动半径为r,有如下式子:c点的瞬时速度为。左右轮间的间距为l,...
机器人控制方面有两种模型,一是自行车模型,二是差速模型,今天主要推导了差速模型,实验室的履带车都是差速模型。
参考了两轮差速移动机器人运动分析、建模和控制_二轮差速-CSDN博客博文。

假设电机输出的角速度为和
,轮子驱动半径为r,有如下式子:
c点的瞬时速度为。
左右轮间的间距为l,转弯半径oc到c的距离为R,转弯时有,因为车辆转弯时是同轴的。故有
,进而有。
所以可知转弯半径.
上述是基础。需要整合一下,也是最关键一步。结合图分析有如下的:
需要对上述式子离散化处理:T为采样时间。
这就是所谓的一个系统的被控对象的状态方程,后续可对其设计控制器等等。这里我们选择输入为vl和vr。
如果是在Ros机器人 操作系统框架下,那么我们选择的输入控制量为和
,但是在控制电机时,我们比较喜欢vl和vr,所以需要进行反解算出
,
。
我们要做一个航向角跟踪 a=k*error。
如果觉得文章还不错,可以关注下我的微信公众号:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 31
31 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)