OpenIPC开源图传系统搭建(SSC338Q+IMX415)——硬件部分
本文将介绍OpenIPC的软硬件系统搭建过程,其中摄像头采用安佳SSC338Q + IMX415模组,地面站采用雄迈海思NVR主板,型号为NBD8010S-KL-V2,无线网卡采用必联BL-M8812EU2,本文仅涉及图传系统的软硬件搭建及测试,目前系统未接入无人机(因为本文作者目前还没有制作无人机),后期制作无人机后会接入。
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
OpenIPC开源图传系统搭建(SSC338Q+IMX415)——硬件部分
- 前言
- 一、硬件部分
-
- 1.总体方案
- 2.硬件清单
- 3.硬件功能介绍
-
- 3.1摄像头模组 (SSC338 + IMX415800S,配 F1.0 新款配座子小镜头 2.8mm镜头 带尾线)
- 3.2雄迈海思NVR主板NBD8010S-KL-V2 10路800万H.265
- 3.3BL-M8812EU2远距离无人机5G大功率wifi模块
- 3.4DC-DC降压电源模块 输入6.5~16V转5V 稳压模块足4A
- 3.5FTDI模块 USB转TTL 支持3.3V 5V FT232RL模块
- 3.6测试架PCB夹子治具夹具探针下载程序编程烧录 有线,单排,排针数:2P
- 3.7FFC/FPC软排线扁平连接线0.5mm,11P-同向
- 3.8FPC连接器 11PIN[下接翻盖式]
- 3.9P50 探针,P50-D1(圆头)
- 3.105.8Gwifi内置蓝牙贴片天线
- 3.11USB单头数据线
- 3.12jst1.25mm空中延长线对接 3P公头/线长15CM
- 3.13JST1.25mm端子,3p,弯针
- 3.14jst1.25mm空中延长线对接,4P公头/线长15CM
- 总结
前言
本文将介绍OpenIPC的软硬件系统搭建过程,其中摄像头采用安佳SSC338Q + IMX415模组,地面站采用雄迈海思NVR主板,型号为NBD8010S-KL-V2,无线网卡采用必联BL-M8812EU2,本文仅涉及图传系统的软硬件搭建及测试,目前系统未接入无人机(因为本文作者目前还没有制作无人机),后期制作无人机后会接入。
本文主要参考:openipc-wiki, A step-by-step installation guide for an FPV setup,The OpenIPC build part 1: What is OpenIPC, and what am I using to build it? ,The OpenIPC build part 2: Flashing firmware and getting the video stream working
本文如有未描述清楚的地方欢迎留言咨询,或者参考以上开发者的文章和视频,最后感谢开发者的无私奉献,引用OpenIPC Wiki的原话,希望 :“Improving the world, one patch at a time.”
一、硬件部分
1.总体方案
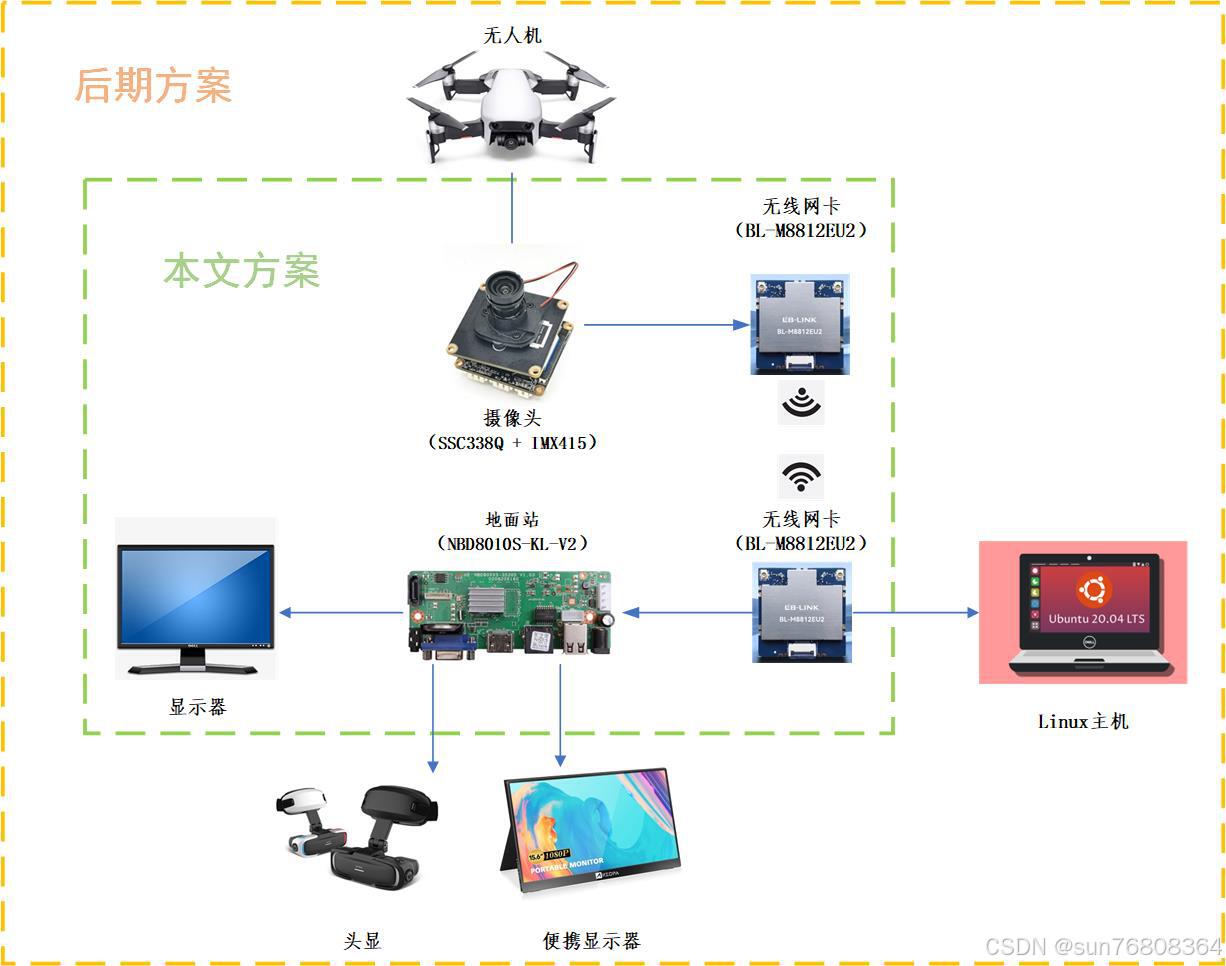
本文作者的最终构想是实现一台具有AI算力的fpv无人机,总体设计方案如下。
关于摄像头与地面站的选择,本人属于OpenIPC小白,且经过调研,OpenIPC对SSC338Q + IMX415的支持较好,同时考虑到外出飞行的便携性,NVR主板NBD8010S-KL-V2体已经较小,再考虑刷写的便捷性,因此选择了开发者相同的硬件,方便系统实现,此外本人近视,并且晕3D,主流的FPV眼镜可能无法适应,且功能单一,后期考虑使用已购买的goovis art头显作为FPV眼镜,NBD8010S-KL-V2有HDMI接口,可以满足要求。
关于网卡的选择,开发者使用的网卡为RTL8812AU,淘宝卖家说BL-M8812EU2更适合做无人机图传,同时看到网上不少人在使用BL-M8812EU2,于是我买了2片,未深入了解,BL-M8812EU2相对于RTL8812AU的区别大概是:
| BL-M8812EU2 | RTL8812AU |
|---|---|
| 新 | 旧 |
| 贵 | 相对便宜(很多2手) |
| 电源5V | 电源3.3V |
| 功率更大 | 功率稍小 |
此外,地面站与摄像头的固件基本都已经内置了RTL8812AU的驱动,因此刷写起来相对更加容易。针对本文的摄像头与地面站硬件搭配,摄像头固件已经内置了BL-M8812EU2驱动,但截至目前(2025-1-22)地面站固件中还没有BL-M8812EU2驱动,需要自行添加,因此可以采用BL-M8812EU2作为摄象头网卡,RTL8812AU作为地面站网卡的方案,刷写也相对容易。
后续有时间我也会出一篇为固件增加网卡驱动的文章,当然各位读者也可以参考Adding a wifi driver to your firmware自行添加,需要Linux环境,我也是参照这个做的。
2.硬件清单
本文所用到的详细硬件清单如下,价格有波动仅供参考:
| 序号 | 硬件名称 | 价格(含运费) |
|---|---|---|
| 1 | 摄像头模组 (SSC338 + IMX415800S,配 F1.0 新款配座子小镜头 2.8mm镜头 带尾线)*1 | 216 |
| 2 | 雄迈海思NVR主板NBD8010S-KL-V2 10路800万H.265 *1 | 129 |
| 3 | BL-M8812EU2远距离无人机5G大功率wifi模块 *2 | 132 |
| 4 | DC-DC降压电源模块 输入6.5~16V转5V 稳压模块足4A *1 | 7.2 |
| 5 | FTDI模块 USB转TTL 支持3.3V 5V FT232RL模块 *1 | 5 |
| 6 | 测试架PCB夹子治具夹具探针下载程序编程烧录 有线,单排,排针数:2P *1 | 11.76 |
| 7 | FFC/FPC软排线扁平连接线0.5mm,11P-同向 *10 | 2.1 |
| 8 | FPC连接器 11PIN[下接翻盖式] *5 | 2.55 |
| 9 | P50 探针,P50-D1(圆头) *10根 | 5 |
| 10 | 5.8Gwifi内置蓝牙贴片天线 *4 (商家送了5根) | 3.6 |
| 11 | USB单头数据线,公头 4芯 *1 | 2.06 |
| 12 | jst1.25mm空中延长线对接 3P公头/线长15CM *10 | 2 |
| 13 | JST1.25mm端子,3p,弯针 *100 | 3 |
| 14 | jst1.25mm空中延长线对接,4P公头/线长15CM *10 | 4.6 |
合计有效的花费约525.87,此外还用到了已有的12VDC电源2个,220-12V开关电源1个,交换机1个、网线若干、mini-usb线1条、电烙铁、热风枪、焊锡、热缩管、杜邦线、标签纸、显示器(HDMI接口)等,下面会对每个硬件的用途做详细的介绍,各位读者可以根据自身条件选择是否购买。
3.硬件功能介绍
3.1摄像头模组 (SSC338 + IMX415800S,配 F1.0 新款配座子小镜头 2.8mm镜头 带尾线)
包含处理芯片,传感器、镜头和尾线,其中尾线是必要的,用来为摄像头模组供电和连接网线,刷写和修改文件时会用到,下图中白色线就是尾线。
3.2雄迈海思NVR主板NBD8010S-KL-V2 10路800万H.265
刷入地面站固件,接收摄像头传过来的数据并解码输出显示,本文的想法是将视频信号输出到头显,替代fpv眼镜。后期会考虑制作外壳以及购买对应的移动电源为其供电。
3.3BL-M8812EU2远距离无人机5G大功率wifi模块
用来建立wifi信号传输图像信息,一个接摄像头作为发射端,一个接地面站作为接收端,实测发热较为严重,测试时需要用风扇对着吹,实际作为图传时需要为其准备专用的风扇。
3.4DC-DC降压电源模块 输入6.5~16V转5V 稳压模块足4A
我没有单独的5V电源,购买这个DC-DC降压模块的主要用于为接入摄像头的网卡提供5V电源,我的做法是从手头的开关电源12V输出接到降压模块得到5V的直流电源,如果你有其他5V直流电源可以不买。
3.5FTDI模块 USB转TTL 支持3.3V 5V FT232RL模块
FTDI模块用于地面站以及摄像头的固件刷写,开发者用的也是这一款,其他的模块据说也可以,我没有尝试过。
需要注意的是:
1.这个模块可以切换3.3V与5V模式,在刷写的时候需要切换到3.3V,摄像头和地面站都可以在此模式下刷写,也比较安全。
2.此模块是mini-USB接口,因此还需要准备一根mini-USB线。
3.刷写时模块的TX接到板上的RX,RX接到板上的TX,即交叉连接。
3.6测试架PCB夹子治具夹具探针下载程序编程烧录 有线,单排,排针数:2P
摄像头模块的下载引脚TX、RX时两个焊点,连接不太方便。如图所示,
我看到的有三种下载方式可供选择,第一是开发者的方法,采用3D打印的夹具加上本文3.9提到的探针进行下载,不同的是以免损伤焊盘,本文采用了圆头探针,开发者采用的是尖头探针,如下图。
第二是本文采用的方法,本文购买了一个测试夹,如下图所示。
测试夹上的PCB是由螺丝固定的,很好拆卸,测量好尺寸,在某创白嫖了几块PCB,如下图所示。
焊接好本文3.9提到的探针,并加以固定,就是我刷写摄像头所用的夹具,如下图。
由于摄像头下载焊盘左侧有突出SD卡槽,在设计PCB时探针的位置偏左,效果不能说很好,只能说还行,供各位参考。
此外,第三种方式,如果你的焊接水平过硬,可以考虑直接焊接导线到焊盘上进行下载,有碰到旁边元件的风险。
3.7FFC/FPC软排线扁平连接线0.5mm,11P-同向
BL-M8812EU2上有两种接线方式,一是通过底部的焊接点直接焊接,二是可以通过中间也是靠底部的11pinFPC排线底座。由于之前没有经验,同时不确定上无人机或者接到地面站合适的线长,在测试阶段,我选择通过FPC软排线连接该网卡。
首先我购买了一些FPC软排线,11pin,0.5mm间距,卖家相对较少,但也不贵,如图。
此处我在某创白嫖了第二块pcb,如图。
焊接好排针以及3.8提到的底座、接好3.10提到的天线后,效果如下。
由于本人焊接水平不行,在此感谢帮忙焊接的同学。
3.8FPC连接器 11PIN[下接翻盖式]
通过PCB将排线与2.54排针连接,方便插接杜邦线,参数为11pin,0.5mm间距如图所示。
3.9P50 探针,P50-D1(圆头)
探针分两段,下面接触焊点那一段遇到压力可以缩进去上面一部分,保证夹得还比较紧,参数为P50-D1,如下图。
原来想着通过测试夹具既能帮助摄象头刷写,又能帮助地面站刷写,因此打的PCB版有侧面和中间两套孔,实际针头太细,在地面站的三个下载孔会直接穿过去,因此仅用于摄像头的刷写,且首次刷写完成后,可以通过vi编辑器开通第二个下载口,除非遇到什么重大问题,后面可以不再使用这两个焊点来刷写了。
3.105.8Gwifi内置蓝牙贴片天线
天线参数为,IPEX(1.13线)与网卡天线底座匹配,5.8G,4个以上,如图。
本组天线仅用于可行性测试,后期会更换天线
3.11USB单头数据线
用于传输地面站网卡数据到地面站USB接口,杜邦头是自己接的,如图。
后期可能不用这根线。
3.12jst1.25mm空中延长线对接 3P公头/线长15CM
3P jst1.25mm线如图。
本文在两处用到了该线,一是刷写摄像头时,从左侧3Pin接口引出GND,接到FTDI模块,板上GND较多,经测试都是连接在一起的,此步骤也可以用4P jst1.25mm线实现。
二是刷写地面站时,为了方便使用3P jst1.25mm线以及3p JST1.25mm端子进行连接下载,如图。
3.13JST1.25mm端子,3p,弯针
JST1.25mm端子,3p,弯针 端子如图。
地面站固件刷写相关的三个孔位RX、TX、GND未焊接任何东西,焊接JST1.25mm端子,3p,弯针端子后可以方便端子线插接,如图。
3.14jst1.25mm空中延长线对接,4P公头/线长15CM
jst1.25mm4P公头端子线如下图。
主要用在改进后的固件刷写口和wifi数据传输口,如下图。
总结
以上为本人在搭建OpenIPC开源图传系统(SSC338Q+IMX415)过程中所购买和制作的相关硬件,合计有效的花费约525.87,此外还用到了已有的12VDC电源2个,220-12V开关电源1个,交换机1个、网线若干、mini-usb线1条、电烙铁、热风枪、焊锡、热缩管、杜邦线、标签纸、显示器(HDMI接口)等。
由于本文篇幅已经较长,软件刷写的流程将会在后续文章中给出,本人水平有限,希望相关过程能够帮助到看到这篇文章的一些同学。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)