具身智能:宇树机器人开源整理以及技术解析猜测
近年来,具身智能正悄然成为科技领域的新风口。从最初试探性的机器人走路跌跌撞撞,到如今能在春晚舞台上翩翩起舞、在高速奔跑中展现灵敏反应,机器人运动控制技术正以前所未有的速度进步。构建一个具备类人认知与运动能力的AGI机器人,不仅是许多科研工作者的梦想,更是工业界迈向智能制造的重要突破。随着量产流程不断成熟以及硬件成本的持续降低(价格已降至万元级别左右),机器人从实验室逐渐走向实际应用的舞台。本文基于
1. 引言
近年来,具身智能正悄然成为科技领域的新风口。从最初试探性的机器人走路跌跌撞撞,到如今能在春晚舞台上翩翩起舞、在高速奔跑中展现灵敏反应,机器人运动控制技术正以前所未有的速度进步。构建一个具备类人认知与运动能力的AGI机器人,不仅是许多科研工作者的梦想,更是工业界迈向智能制造的重要突破。随着量产流程不断成熟以及硬件成本的持续降低(价格已降至万元级别左右),机器人从实验室逐渐走向实际应用的舞台。本文基于《宇树开源整理(1) - 概览》的系列文章,结合当前网络上的前沿研究信息,全面解析宇树开源平台的技术体系,并对相关算法和实验细节做进一步探讨。
2. 开源仓库全景解析
宇树开源平台目前涵盖了超30个不同项目,其中以下16个仓库在GitHub上受到了广泛关注,按Star数降序排列如下:
| 排名 | 仓库名称 | 仓库介绍 | Star 数量 |
|---|---|---|---|
| 1 | unitree_rl_gym | 基于NVIDIA Isaac强化学习示例,支持Go2、H1、G1等多个型号机器人。 | 1516 |
| 2 | unitree_ros | ROS仿真包,内含所有Unitree系列机器人的URDF文件,并提供详细的物理参数。 | 767 |
| 3 | avp_teleoperate | 利用Apple Vision Pro平台实现远程操控Unitree G1和H1_2机器人。 | 677 |
| 4 | unitree_guide | 结合《四足机器人控制算法 —— 建模、控制与实践》一书的实例,实现控制算法示范。 | 373 |
| 5 | unitree_legged_sdk | 面向Aliengo、A1、Go1、B1等机器人开发真实环境应用的SDK。 | 332 |
| 6 | unitree_mujoco | 以Mujoco为模拟器,支持C++/Python接口,集成地形生成器,用于仿真与真实系统之间的迁移。 | 326 |
| 7 | point_lio_unilidar | 针对SLAM实现的Point-LIO激光惯性里程计,适用于Unitree L1激光雷达。 | 277 |
| 8 | unitree_sdk2 | 为Go2、B2、H1、G1等机器人在真实环境开发提供SDK工具。 | 252 |
| 9 | unitree_IL_lerobot | 以G1双臂作为数据采集及测试平台,基于改进的LeRobot框架实现。 | 168 |
| 10 | unitree_ros2 | 在ROS2环境下开发Go2与B2机器人,接口与unitree_sdk2保持一致。 | 196 |
| 11 | unitree_sdk2_python | unitree_sdk2的Python接口。 | 121 |
| 12 | unitree_model | 提供多种格式的机器人3D建模文件(包括xacro和URDF)。 | 39 |
| 13 | kinect_teleoperate | 利用Azure Kinect DK相机,实现对Unitree H1机器人的远程操控。 | 42 |
| 14 | unitree_actuator_sdk | 针对机器人执行器(电机等)的专用SDK。 | 61 |
| 15 | unilidar_sdk2 | 针对Unitree L2激光雷达开发的SDK。 | 12 |
| 16 | z1_ros | 针对Z1机器人的ROS仿真包。 | 23 |
各仓库从底层物理建模到高层控制策略,构成了一个完整、开放的机器人研发生态。这样的开放平台不仅加速了学术研究的进程,也大大降低了机器人技术应用的门槛。
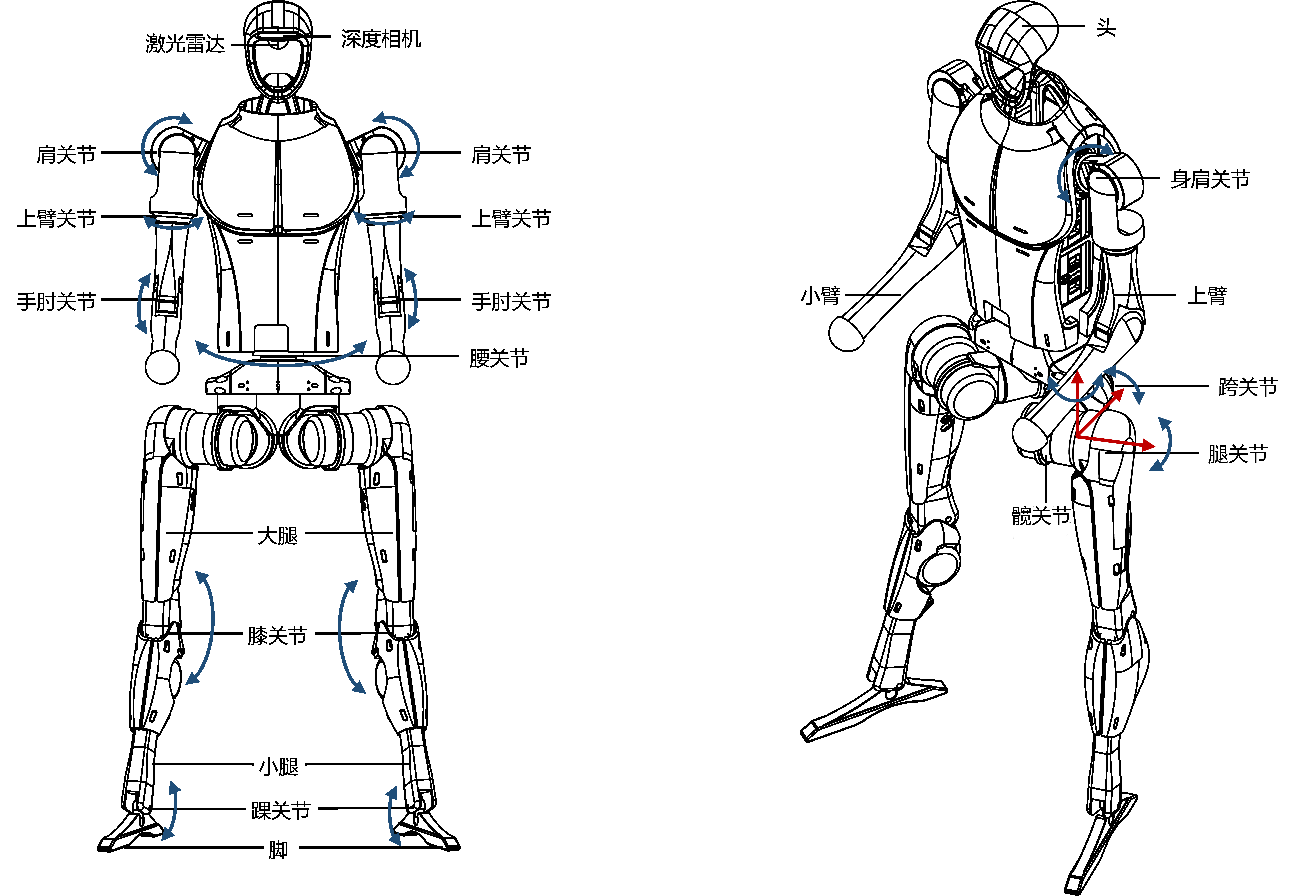
3. 人形机器人平台与硬件构成
目前市面上最具代表性的人形机器人包括Unitree H1、H1-2和G1,它们在感知模块、处理器配置以及自由度设计上各有侧重:
| 机器人名称 | 感知传感器 | 控制计算单元 | 开发计算单元 | 总自由度(单腿/单手臂) |
|---|---|---|---|---|
| Unitree H1 | 3D激光雷达(MID-360) + 深度相机(D435) | Intel Core i5-1235U | Intel Core i7-1255U/1265U | 5/4 |
| Unitree H1-2 | 3D激光雷达(MID-360) + 深度相机(D435) | Intel Core i5-1235U | Intel Core i7-1255U/1265U | 6/7 |
| Unitree G1 | 3D激光雷达(MID-360) + 深度相机(D435i) | —— | Jetson Orin NX | 6/5 |
注意: 此处"运控计算单元"指机器人内部专用的运动控制程序,不对外开放;而"开发计算单元"则提供了二次开发接口,为算法升级和功能扩展提供硬件支持。 !机器人硬件示意图 此外,当前硬件平台不断追求轻量化与高性能计算的平衡,这不仅使得机器人运动更加敏捷准确,同时也为多传感器融合和实时决策提供了保障。诸如Jetson Orin NX这样的嵌入式计算平台已成为智能机器人控制的重要加速器。
4. 强化学习基础与实现原理
4.1 核心要素综述
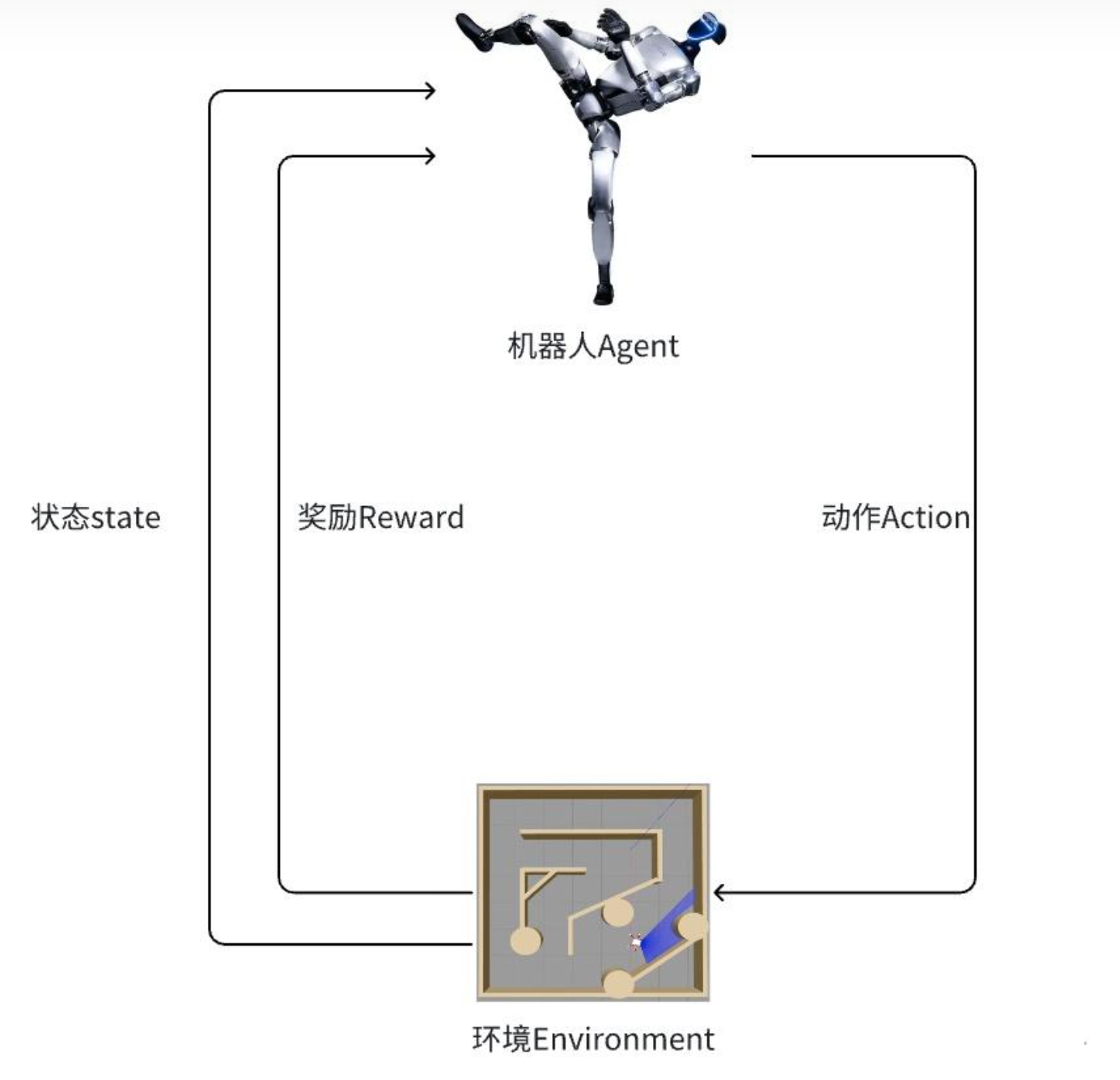
强化学习(Reinforcement Learning, RL)依靠智能体(agent)在与环境不断交互的过程中,通过奖惩反馈逐步优化行为策略,以达到长期收益最大化。其基本框架包括:
- 环境(Environment): 如今主流的机器人仿真平台包括英伟达的Isaac Gym(现升级为Isaac Lab)。
- 动作(Action): 机器人控制目标,通过传递给PD控制器实现关节位置或速度的精密调整。 奖励函数(Reward): 用于量化动作效果的代码模块,每个细分部分(如速度、角速度、加速度、碰撞等)都设置了相应惩罚或奖励。
在物理模拟与真实部署中,奖励函数及其各项指标至关重要。例如,以下部分代码展示了激励基准和惩罚项的计算过程:
| 函数名 | 功能描述 | 计算公式 |
|---|---|---|
_reward_lin_vel_z |
惩罚 z 轴的基础线性速度 | torch.square(self.base_lin_vel[:, 2]) |
_reward_ang_vel_xy |
惩罚 xy 轴的基础角速度 | torch.sum(torch.square(self.base_ang_vel[:, :2]), dim=1) |
_reward_orientation |
惩罚非水平的基础朝向 | torch.sum(torch.square(self.projected_gravity[:, :2]), dim=1) |
_reward_base_height |
惩罚基础高度偏离目标值 | torch.square(base_height - self.cfg.rewards.base_height_target)其中 base_height = self.root_states[:, 2] |
_reward_torques |
惩罚施加的扭矩 | torch.sum(torch.square(self.torques), dim=1) |
_reward_dof_vel |
惩罚关节自由度的速度 | torch.sum(torch.square(self.dof_vel), dim=1) |
_reward_dof_acc |
惩罚关节自由度的加速度 | torch.sum(torch.square((self.last_dof_vel - self.dof_vel) / self.dt), dim=1) |
_reward_action_rate |
惩罚动作的变化 | torch.sum(torch.square(self.last_actions - self.actions), dim=1) |
_reward_collision |
惩罚选定身体部位的碰撞 | torch.sum(1.*(torch.norm(self.contact_forces[:, self.penalised_contact_indices, :], dim=-1) > 0.1), dim=1) |
_reward_termination |
终端奖励 / 惩罚 | self.reset_buf * ~self.time_out_buf |
_reward_dof_pos_limits |
惩罚关节自由度位置接近极限值 | torch.sum(out_of_limits, dim=1)其中 out_of_limits = -(self.dof_pos - self.dof_pos_limits[:, 0]).clip(max=0.) + (self.dof_pos - self.dof_pos_limits[:, 1]).clip(min=0.) |
_reward_dof_vel_limits |
惩罚关节自由度速度接近极限值 | torch.sum((torch.abs(self.dof_vel) - self.dof_vel_limits * self.cfg.rewards.soft_dof_vel_limit).clip(min=0., max=1.), dim=1) |
_reward_torque_limits |
惩罚扭矩接近极限值 | torch.sum((torch.abs(self.torques) - self.torque_limits * self.cfg.rewards.soft_torque_limit).clip(min=0.), dim=1) |
_reward_tracking_lin_vel |
跟踪线性速度指令(xy 轴) | torch.exp(-lin_vel_error / self.cfg.rewards.tracking_sigma)其中 lin_vel_error = torch.sum(torch.square(self.commands[:, :2] - self.base_lin_vel[:, :2]), dim=1) |
_reward_tracking_ang_vel |
跟踪角速度指令(偏航) | torch.exp(-ang_vel_error / self.cfg.rewards.tracking_sigma)其中 ang_vel_error = torch.square(self.commands[:, 2] - self.base_ang_vel[:, 2]) |
_reward_feet_air_time |
奖励长步幅 | 一系列逻辑处理后得到 rew_airTime,逻辑见原代码 |
_reward_stumble |
惩罚脚撞到垂直表面 | torch.any(torch.norm(self.contact_forces[:, self.feet_indices, :2], dim=2) > 5 * torch.abs(self.contact_forces[:, self.feet_indices, 2]), dim=1) |
_reward_stand_still |
惩罚零指令下的运动 | torch.sum(torch.abs(self.dof_pos - self.default_dof_pos), dim=1) * (torch.norm(self.commands[:, :2], dim=1) < 0.1) |
_reward_feet_contact_forces |
惩罚脚部的高接触力 | torch.sum((torch.norm(self.contact_forces[:, self.feet_indices, :], dim=-1) - self.cfg.rewards.max_contact_force).clip(min=0.), dim=1) |
注意:这是标准的奖励函数,每个机器人都有一些微调的奖励函数,这里就不一一整理了。
4.2 观测和动作通道
观测信息由多个部分拼接而成,包括:
-
机器人的线速度 (
base_lin_vel)
通过obs_scales.lin_vel进行缩放。 -
机器人的角速度 (
base_ang_vel)
通过obs_scales.ang_vel进行缩放。 -
投影重力 (
projected_gravity) -
控制命令的前三个维度
包括 x 速度、y 速度和偏航速度,通过commands_scale进行缩放。 -
关节位置相对于默认位置的偏差
计算方式为self.dof_pos - self.default_dof_pos,并通过obs_scales.dof_pos进行缩放。 -
关节速度 (
dof_vel)
通过obs_scales.dof_vel进行缩放。 -
上一步的动作 (
actions)
4.3 动作 (Action)
在代码实现中,动作可以被看作是传递给比例-微分控制器(PD 控制器)的位置或速度目标。PD 控制器是机器人控制中常用的方法,它根据当前状态和目标状态(由动作表示)计算需要施加的扭矩,从而使机器人的关节移动到期望的位置或达到期望的速度。
注意: 计算得到的扭矩维度必须与机器人的自由度(DOFs,Degrees of Freedom)数量一致。即使某些自由度没有被驱动(没有对应的执行器控制这些自由度的运动),也必须满足该要求。这是为了确保扭矩向量能够与机器人的每个关节正确对应,以便于后续的控制操作。
在 _compute_torques 方法中,根据配置文件中 control_type 的不同取值,代码对动作进行了不同方式的处理。
5. 模仿学习 (Imitation Learning)
点击具身智能:宇树机器人开源整理以及技术解析猜测查看全文

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 28
28 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)