研究人员利用非线性原理为机器人创造出类似昆虫的步态,脑机接口也可以使用...
他们的实验性机器人及其步态耦合方案的视图。图片来源:Ludovico Minati日本和意大利的研究人员正利用混沌和非线性物理为微型机器人创造出类似昆虫的步态,并配备运动控制器,以方便使用...

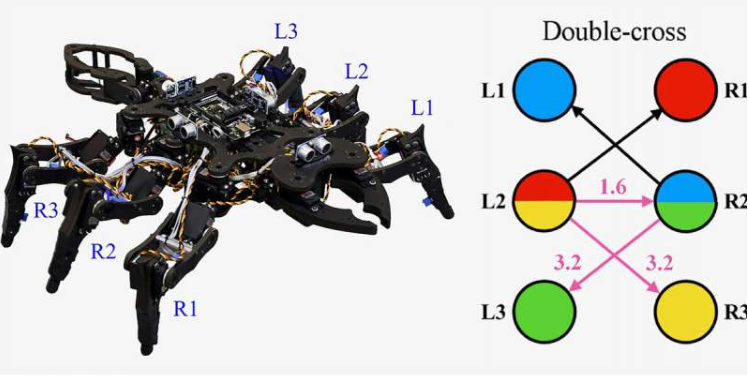
他们的实验性机器人及其步态耦合方案的视图。图片来源:Ludovico Minati
日本和意大利的研究人员正利用混沌和非线性物理为微型机器人创造出类似昆虫的步态,并配备运动控制器,以方便使用脑机接口来进行大脑控制。
生物学和物理学中的很多现象的背后都涉及了基于非线性物理学的基础原理,这给很多研究人员的研究工作带来了启发和灵感。
该研究小组在《Chaos》杂志中描述了使用Rössler系统(一个由三个非线性微分方程组成的系统)作为中央模式发生器(central pattern generators, CPGs)的基本组成部分来控制机器人昆虫步态。
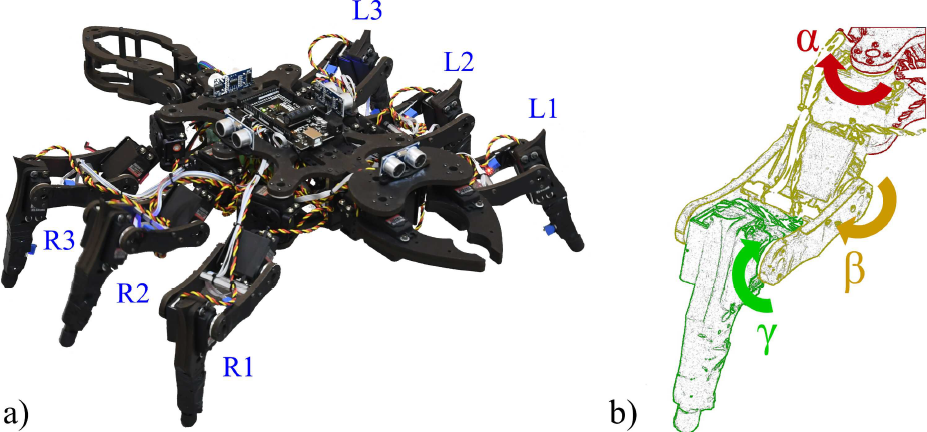
实验机器人的视图,展示了(a)六个腿(L1,L2,L3,R1,R2和R3)的位置,以及(b)相应的关节alpha,beta和gamma。
东京工业大学(Tokyo Institute of Technology)和特伦托大学(University of Trento)的Ludovico Minati表示:“潜在现象的普遍性使我们能够证明,通过Rössler系统的基本组合可以实现运动。”
研究小组结合与同步有关的现象创建了非常简单的网络,以此来生成复杂的节奏模式。
Ludovico Minati表示:“这些网络,也就是前面提到的CPG,是自然界各处腿部运动的基础。”
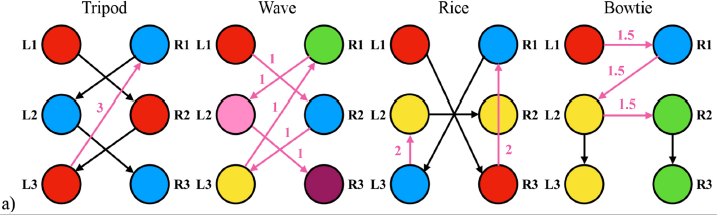
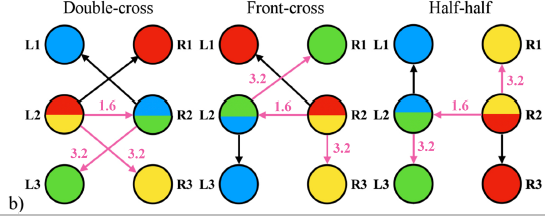
耦合方案实现(a)简单的步态,包括规范的三脚和波型,以及(b)复杂的步态。颜色及其组合表示腿同时摆动或接触地形,顺序如下:红色,蓝色,黄色,绿色,粉红色和紫色。粉色箭头表示延迟耦合。
研究人员从一个极其简单的网络开始,每个实例都与一条腿相关联。然后只需简单地改变耦合和相关的延迟(进行微小的更改),就可以改变步态或创建新的步态。
换句话说,可以通过使单个系统或整个网络更加混乱来增加不规则性。对于非线性系统,输出的变化与输入的变化不成比例。
多种模式下的实验
研究人员进行了多种模式下的实验
1、三脚架步态在周期性模式下的实验运行
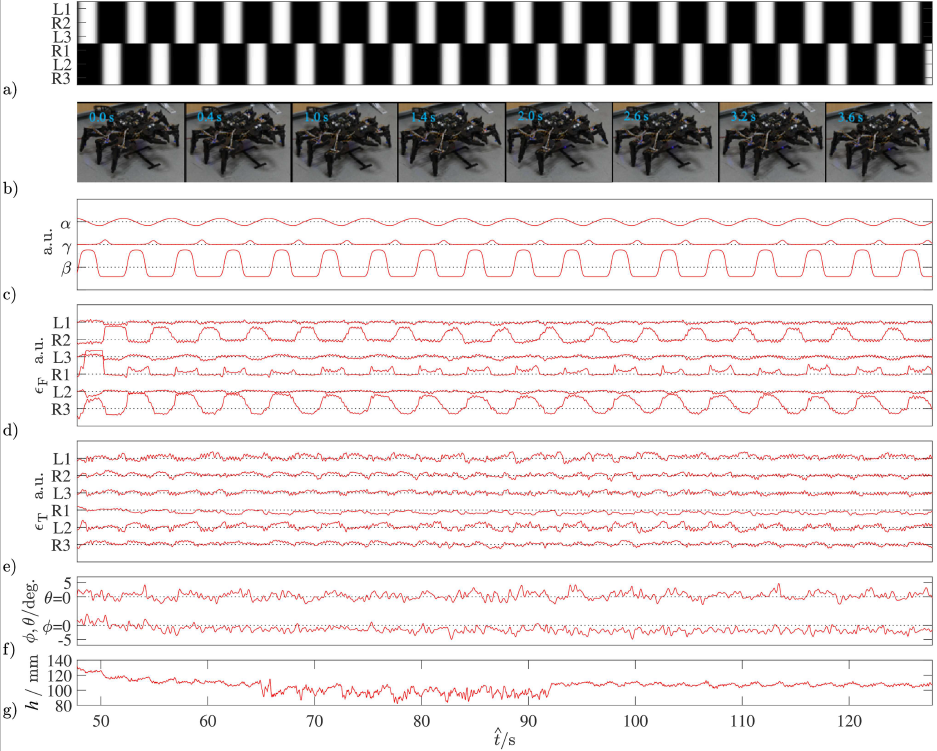
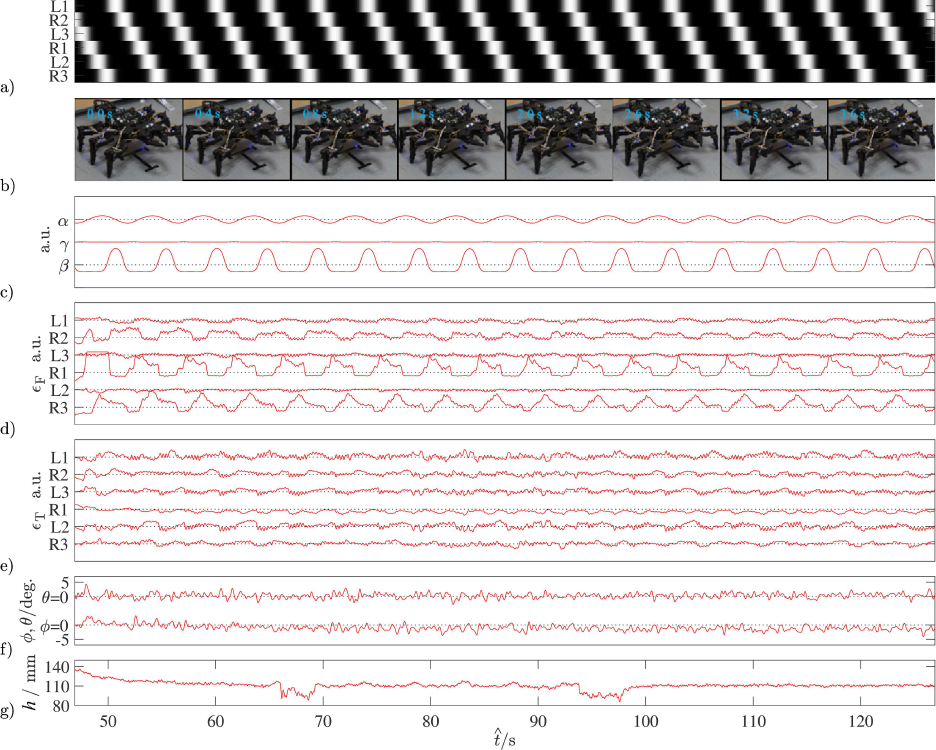
2、周期性模式下的步态实验
3、混沌模式下三脚架步态的实验运行
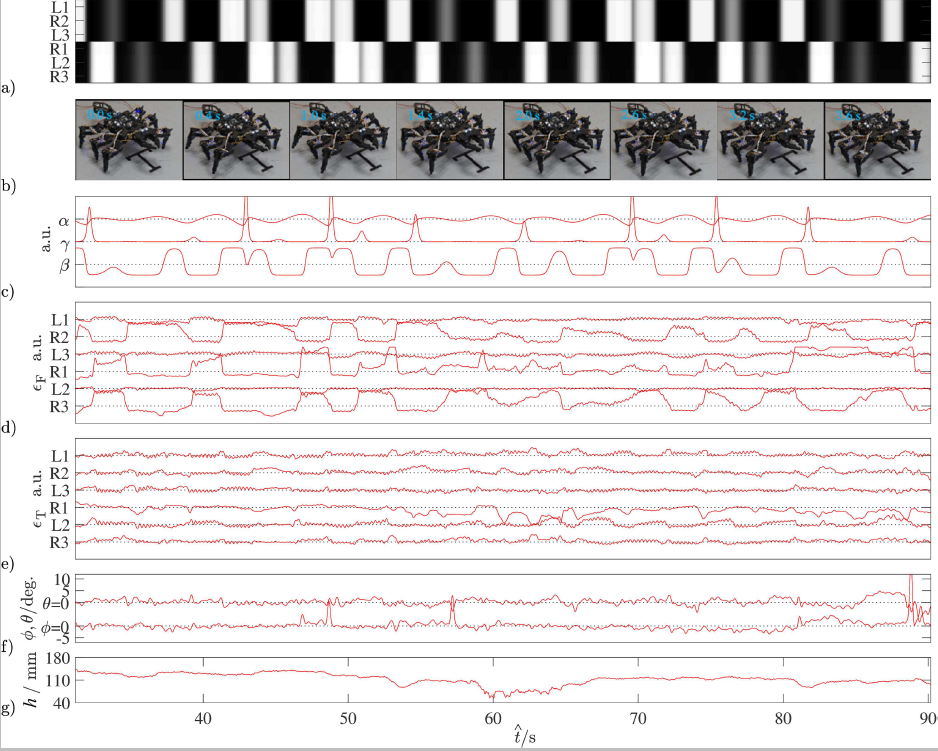
研究人员表示,“这项工作表明,Rössler系统除了具有许多有趣和复杂的特性外,还可以成功地用作构建昆虫机器人的生物启发运动控制器的基础。”
脑机接口控制昆虫机器人运动
研究人员还表示,他们设计的昆虫控制器内置有脑电图,可启用脑机接口,利用脑机接口实现人脑对机器人运动的控制。
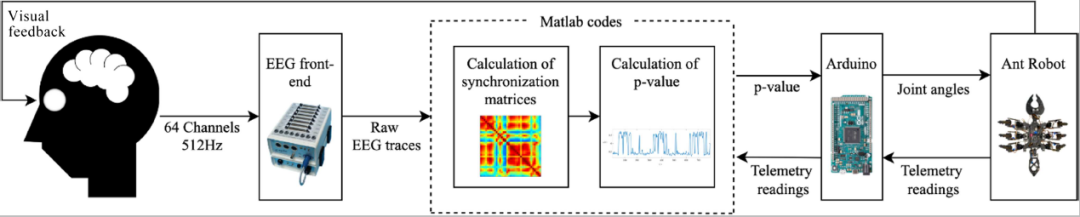
用于实时EEG控制实验的实验设置和数据流
研究人员选取了三位成功参与者的实验,下面是参与人员在实验时的脑电活动记录以及控制机器人的运动轨迹。
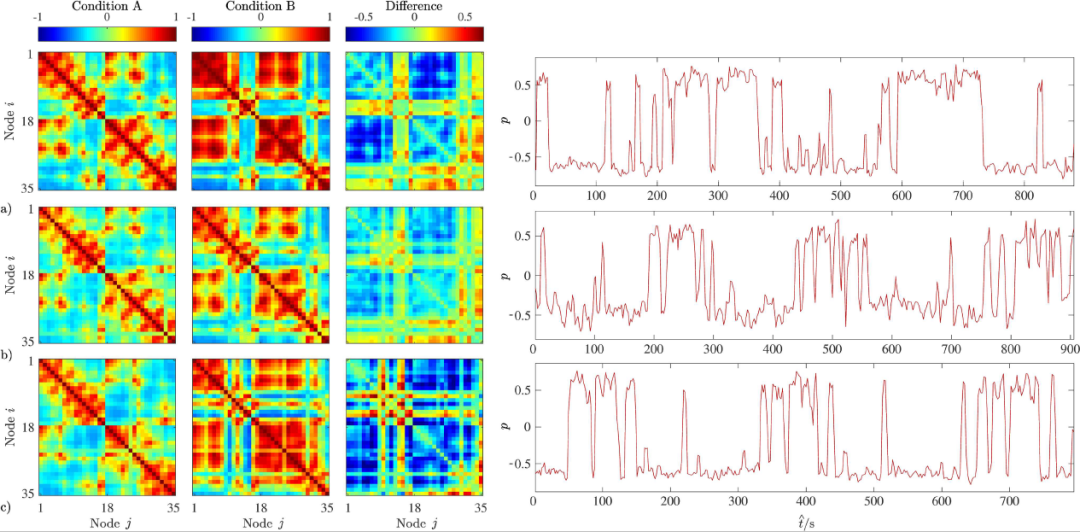
来自三个参与者的大脑活动记录(a) - (c)。
上图中,矩阵表示在两种情况下(任务),所有选定电极上计算的相位同步w以及其差异。节点i、j依次对应额叶、中央和顶叶位置,首先在左半球,然后在右半球的前后方向对应。在实验中控制机器人转向的参数p的时间序列。
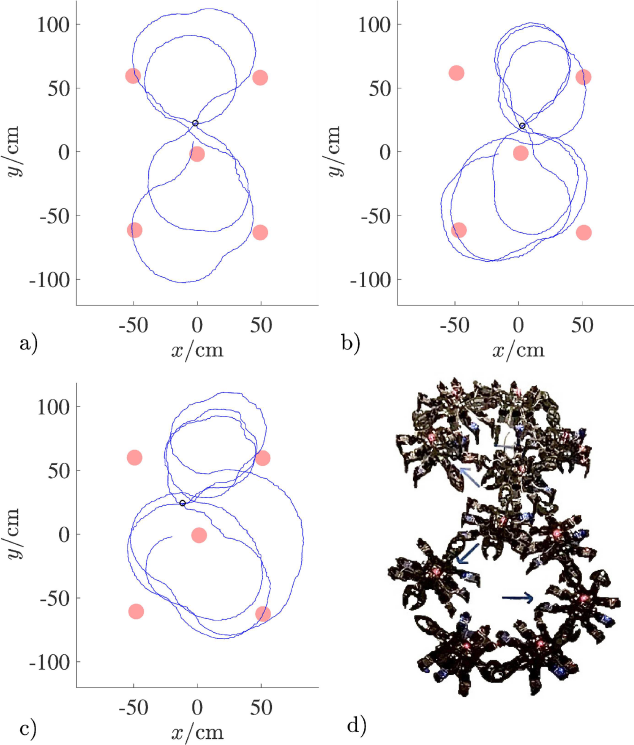
机器人运动轨迹如下图所示,三名参与者(a) - (c)在实验平台上的机器人轨迹。小而浅的圆圈代表起点,而阴影红色的圆盘则代表机器人在每一圈中应该走过的路点。
具体的实现原理
Minati说:“记录一个人的神经电活动,并使用非线性的相位同步概念来提取模式。然后将这种模式用作影响Rössler系统动力学的基础,该系统为昆虫机器人生成行走模式。”
研究人员两次利用非线性动力学的基本思想。
他说:“首先,我们用它们来解码生物活动,然后以反向产生受生物启发的活动。”
Minati说:“这项工作的关键意义在于,它“展示了非线性动力学概念的普遍性,例如Rössler系统的能力,通常在抽象场景中对其进行研究,但此处将其用作生成生物学上合理模式的基础。”
参考文献
Generation of diverse insect-like gait patterns using networks of coupled Rössler systems
https://phys.org/news/2020-12-chaotic-insectlike-gaits-robots.html
仅用于学术交流,不用于商业行为,若有侵权及疑问,请后台留言,管理员即时删侵!
更多阅读

点个在看祝你开心一整天!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 2
2 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)