先锋机器人3(Pioneer3)的基础操控
文本是在安装好ARIA library+ROSARIA+rosaria_client的基础下,用自己的笔记本电脑my_computer去操控Pioneer3
注:ROSARIA+ARIA library的安装可以见我的这另外一篇博客
1、准备工作
在自己的电脑my_computer和robot_computer上分别安装openssh 服务器组件。
说明:实验室A206的robot_computer已经安装好了你现在只要在my_computer上安装即可
sudo apt-get update
sudo apt-get install openssh-server
检查插件是否启动成功
ps -ef| grep sshd
如果只有ssh-agent那ssh-server还没有启动, 如果看到下图sshd那说明ssh-server已经启动了。
Note:若出现问题,参考相关网页:
https://help.ubuntu.com/lts/serverguide/openssh-server.html
http://blog.csdn.net/woshicsdn7547/article/details/11561099
http://jingyan.baidu.com/article/00a07f38a5c05482d128dc5f.html
http://os.51cto.com/art/201104/256070.htm
http://www.jb51.net/article/94599.htm
https://askubuntu.com/questions/144364/ssh-connect-to-host-myremotehost-com-port-22-connection-refused
- 在自己的电脑my_computer打开三个终端,分别将三个终端连接到机载电脑robot-computer(用到的就是上面下载的openssh组件)
连接办法:在my_computer打开终端输入
ssh robot_computer@robot_computer_ip_adress

对指令的说明:
Ⅰ、 robot_computer:是你机器人机载电脑ubuntu的用户名:a206
Ⅱ、robot_computer_ip_adress 可以在robot_computer的终端输入ifconfig去查看(ubuntu下查看ip的方式也有很多种可以自己去CSDN上搜索)
对于实验室A206的机器人可以输入
ssh a206@robot_computer_ip_adress
robot_computer_ip_adress 自己按照上面Ⅱ的说明去查看
之后输入robot_computer的密码:123
即可连接成功
my_computer上三个终端都连接上robot_computer后
第一个终端:
roscore
第二个终端
cd catkin_ws
source devel/setup.bash
cd ..
sudo usermod -a -G dialout $USER
rosrun rosaria RosAria _port:=/dev/ttyS0
第三个终端
cd catkin_ws
source devel/setup.bash
rosrun rosaria_client interface
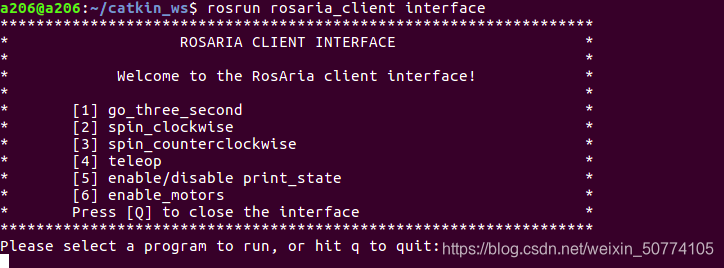
之后即可在第三个终端(如上图所示)用键盘去控制小车的运行
[1]go_three_second ——前进三秒
[2] spin_clockwise ——顺时针旋转
[3] spin_counterclockwise ——逆时针旋转
[4] teleop——键盘控制
[5] enable/disable print_state
[6] enable_motors ——启用电机
Press [Q] to close the interface ——按Q关闭接口
对于my_computery与robot_computer之间文件的传输可以参考这篇博客

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)