机器人学导论-运动学(1)
把机械臂关节变量作为自变量,描述机械臂末端执行器的位置和姿态与机械臂基座之间的函数关系(本章只研究机械臂连杆的位置和姿态)
机械臂正运动学
运动学:把机械臂关节变量作为自变量,描述机械臂末端执行器的位置和姿态与机械臂基座之间的函数关系(本章只研究静止状态下机械臂连杆的位置和姿态)
1.连杆的描述
连杆:刚体,通过关节连接;
关节:转动关节或移动关节;
连杆长度:关节轴 i − 1 i-1 i−1和关节轴 i i i之间公垂线的长度为 a i − 1 a_{i-1} ai−1, a i − 1 a_{i-1} ai−1即为连杆长度;
连杆扭转角:关节轴 i − 1 i-1 i−1和关节轴 i i i之间的夹角为 α i − 1 \alpha_{i-1} αi−1, α i − 1 \alpha_{i-1} αi−1即为连杆扭转角;
连杆偏距:从公垂线 a i − 1 a_{i-1} ai−1与关节轴 i i i的交点到公垂线 a i a_{i} ai与关节轴 i i i交点的有向距离;
关节角:平移公垂线 a i − 1 a_{i-1} ai−1和 a i a_{i} ai绕关节轴 i i i旋转所形成的夹角;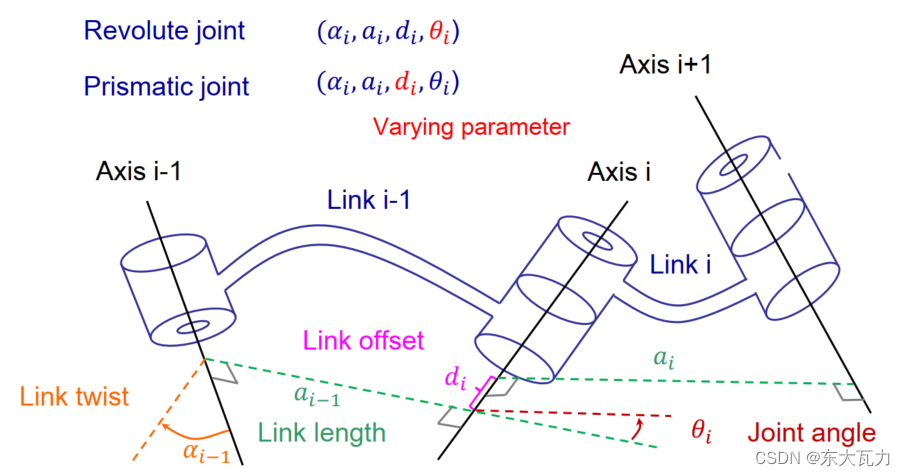
2.MDH建立坐标系
(1)给连杆和关节标号
从机械臂的固定基座开始为连杆进行编号,固定基座为连杆0,第一个可动连杆为连杆1,
以此类推,机械臂最末端的连杆为连杆 n n n;
关节从关节1开始,连杆 i i i与连杆 i + 1 i+1 i+1之间为关节 i + 1 i+1 i+1,没有关节0;
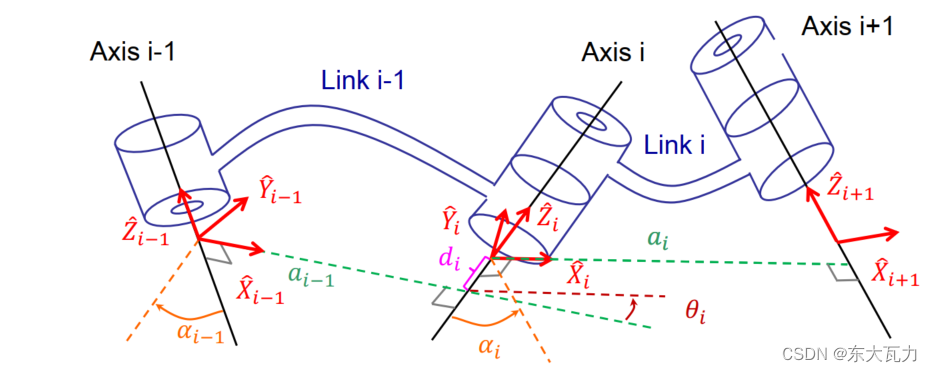
(2)建立各关节坐标系
Z ^ i \hat{Z}_i Z^i:与关节轴(移动或转动) i i i重合;
原点:{ i i i}的轴线和{ i + 1 i+1 i+1}的轴线,如果相交,则交点为原点;
如果不相交,两轴线公垂线和当前关节 i i i轴线的交点为原点;
X ^ i \hat{X}_i X^i:当 i i i的轴线与 i + 1 i+1 i+1的轴线相交,即 a i a_{i} ai等于零,则 X ^ i \hat{X}_i X^i在 Z ^ i \hat{Z}_i Z^i和 Z ^ i + 1 \hat{Z}_{i+1} Z^i+1两轴线所在平面的垂线上;
当 i i i的轴线与 i + 1 i+1 i+1的轴线重合,即 a i a_{i} ai等于零,意味着 i i i关节为移动关节,则 X ^ i \hat{X}_i X^i与 X ^ i − 1 \hat{X}_{i-1} X^i−1平行;
当 i i i的轴线与 i + 1 i+1 i+1的轴线不相交,即 a i a_{i} ai不等于零, X ^ i \hat{X}_i X^i在 Z ^ i \hat{Z}_i Z^i和 Z ^ i + 1 \hat{Z}_{i+1} Z^i+1两轴线的公垂线上,沿着 a i a_{i} ai方向;
当 i i i的轴线与 i + 1 i+1 i+1的轴线平行,即 a i a_{i} ai不等于零, X ^ i \hat{X}_i X^i在 Z ^ i \hat{Z}_i Z^i和 Z ^ i + 1 \hat{Z}_{i+1} Z^i+1两轴线的公垂线上,沿着连杆长度方向;
Y ^ i \hat{Y}_i Y^i:与 X ^ i \hat{X}_i X^i和 Z ^ i \hat{Z}_i Z^i两者垂直,遵循右手定则;
(3)添加首尾坐标系
(1)首坐标系
设定参考坐标系{0}与坐标系{1}重合;
(注:若关节1为移动关节,则坐标系{1}与参考坐标系{0}不重合,姿态相同;
若要求体现出基座的高度,则参考坐标系{0}与坐标系{1}姿态相同);
(2)尾坐标系
对于转动关节 n n n,设定 X ^ n \hat{X}_n X^n与 X ^ n − 1 \hat{X}_{n-1} X^n−1的方向相同(或 X ^ n \hat{X}_n X^n沿着连杆长度方向);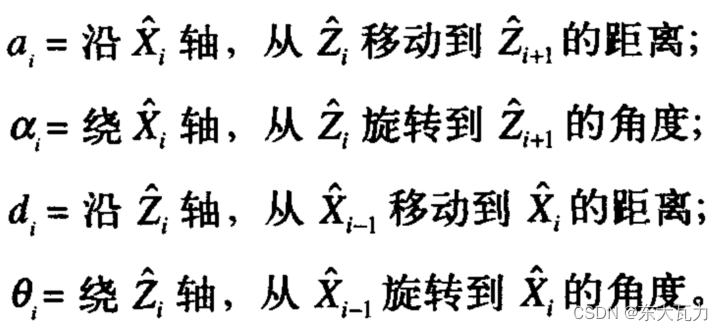
3.连杆变换推导
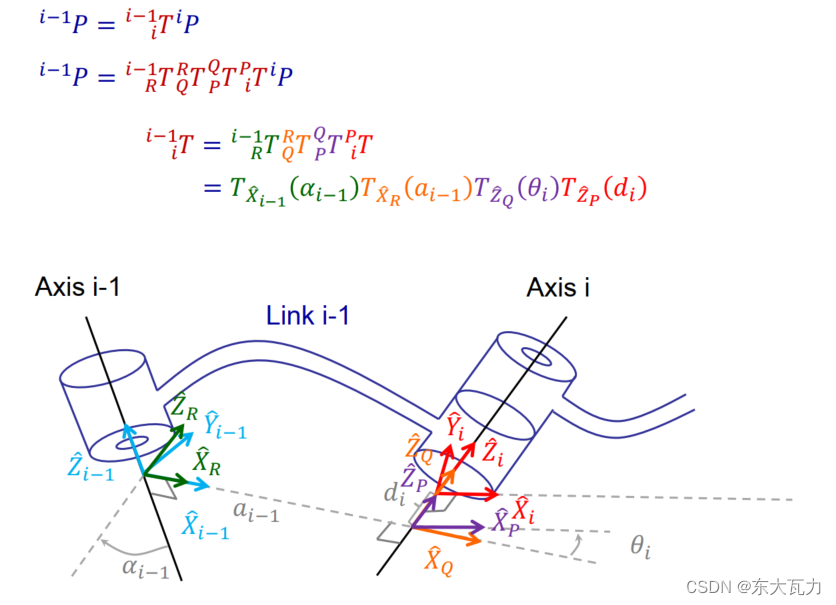
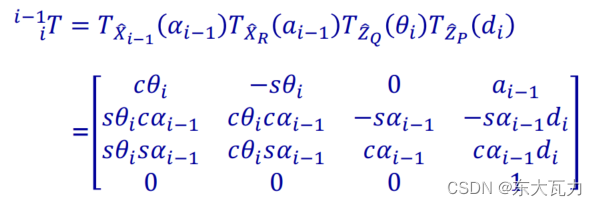
连续变换
4.驱动器空间、关节空间和笛卡尔空间
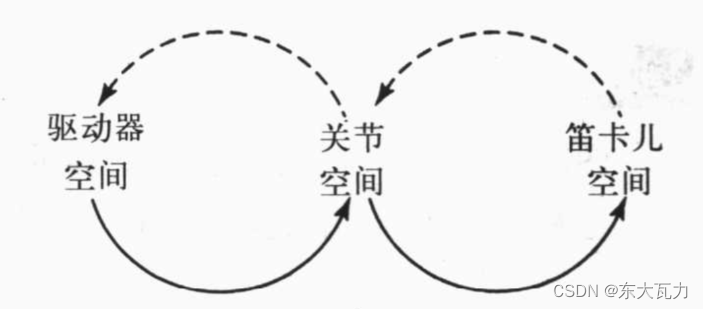
例:电机通过减速齿轮箱与关节相连,所以驱动器空间与关节空间之间变换如下图所示: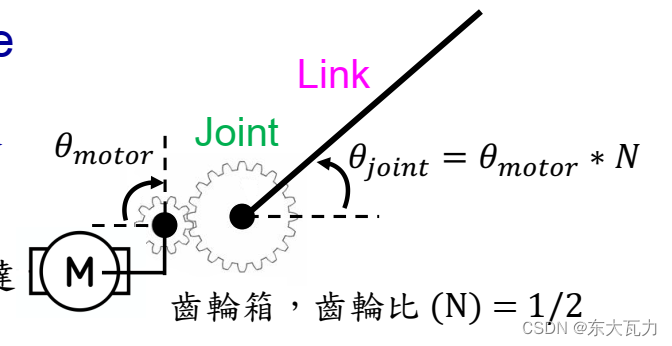
5.坐标系的标准命名
基坐标系{B}:连杆0、坐标系{0}
固定坐标系{S}:任务坐标系、世界坐标系或通用坐标系
腕部坐标系{W}
工具坐标系{T}
目标坐标系{G}:对机器人移动工具到达的位置描述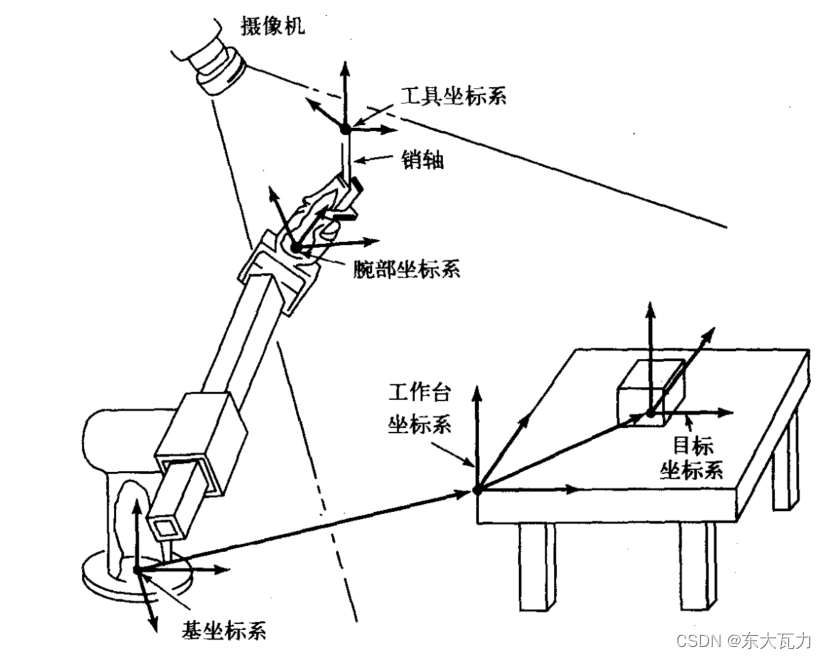
推荐观看:
链接: 直观讲解DH参数
6.参考
[1]约翰 J. 克雷格(John J. Craig)著的机器人学导论,第四版;
[2]台湾大学机器人学之运动学—林沛群;

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)