第一类拉格朗日方程 matlab,自动化3班机器人报告
李胜 自动化3班 20095109Course Project_02Finding the Dynamic Model of a T wo-Link Planar Robot ArmGiven a two-link planar robot arm as follow:图11. Find its Dynamics2. Construct the model using Lagrange Metho
李胜 自动化3班 20095109
Course Project_02
Finding the Dynamic Model of a T wo-Link Planar Robot Arm
Given a two-link planar robot arm as follow:
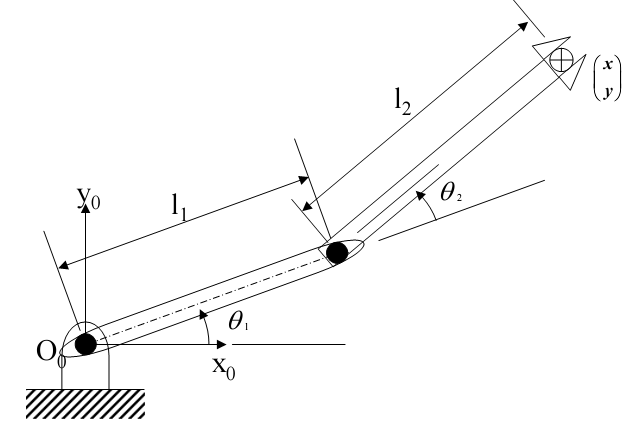
图1
1. Find its Dynamics
2. Construct the model using Lagrange Method
3. Establish the Equations of Motion
4. MA TLAB Simulation and your discussion
1. 求解动态模型方程:
平面坐标系对应的X 和Y 的标量方程如下:
X=1l C 1θ+2l C 12,Y=1l S 1θ+2l S 12,那么对上式求一阶导数得速度表达式:
()()2122112211S l S l -S l -θθθ -+==x
t
x u d d ,
()12211C l C l u d d y t
y +==θ1θ +122C l 2θ
将其转换为雅可比矩阵的形式来表示;?
?
?
???+-=??????=12212211122 12211 S l S l -S l -C l C l C l u u u y x θθ???
?????21θθ ,
其中雅可比矩阵J=???
???+-1221221
1122 12211 S l S l -S l -C l C l C l θθ,这就是利用雅可比矩阵来表示的动态模型方程。
2.用拉格朗日方法构建其模型方程:
2.1 杆1质心K1的位置坐标为111θC P X =,111θS P Y =,杆1质心K1
速度的

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)