

技术视界 | 人形机器人与具身智能:引领智能新时代的全新开发范式
在科技飞速发展的今天,人形机器人正逐渐从科幻走向现实,具身智能基础模型新开发范式的出现,更是为这一领域带来了前所未有的变革与机遇。来自国地共建人形机器人创新中心(以下简称“国地中心”)的研发总监邢伯阳为我们详细介绍了这一创新开发范式,让我们得以一窥人形机器人未来发展的新方向。
在科技飞速发展的今天,人形机器人正逐渐从科幻走向现实,具身智能基础模型新开发范式的出现,更是为这一领域带来了前所未有的变革与机遇。来自国地共建人形机器人创新中心(以下简称“国地中心”)的研发总监邢伯阳为我们详细介绍了这一创新开发范式,让我们得以一窥人形机器人未来发展的新方向。
文末附有原版演讲pdf
具身智能:智能的全新维度
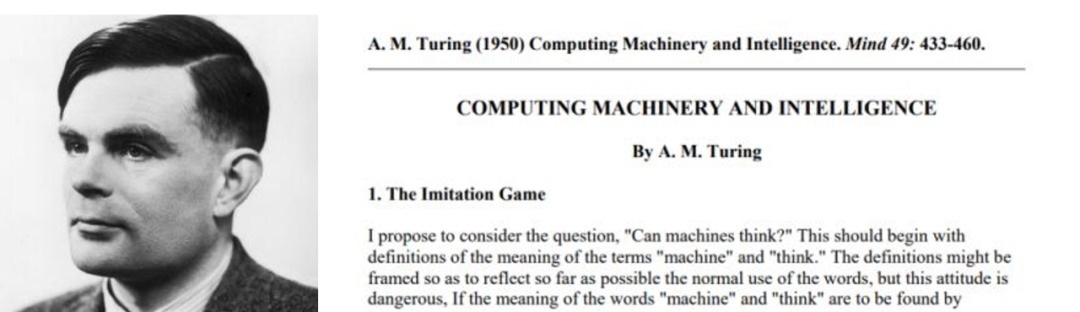
具身智能,是一种具有自身体验、能够改变物理世界的智能。它并非凭空而来,早在1950年,图灵在《Computing Machinery and Intelligence》的论文中就首次提出了具身智能(Embodied Intelligences)的概念。从过去5.4亿年地球生物智能的演化历程来看,所有生物智能都是被身体作用于世界的行为所塑造出来的。而如今,具身智能在人形机器人领域的应用,正逐渐展现出其强大的潜力。
在具身智能的框架下,机器人的智能不再局限于传统的逻辑推理和符号处理,而是通过身体与环境的交互,实现对物理世界的感知、理解和改变。这种智能模式更加接近人类的智能方式,能够让人形机器人在复杂多变的环境中展现出更加灵活、自然的行为。
传统开发范式的困境与挑战
尽管人形机器人的概念已经存在多年,但传统的开发范式面临着诸多困境和挑战。
- 控制系统模型不精确,对扰动无法建模穷举
Traditional Control System:基于Model Based的方案完成对系统简化处理,外部扰动难以建模,无法实现穷举
- 模型无法自演进,参数无法自适应
Auto Tunning:传统控制算法参数无法自整定,采用切换系统完成对不同控制目标的系统设计
- 开发范式周期长,算法迭代要求高、研发链条长
New System:新控制系统设计需要完整的流程,包括建模、辨识、控制系统设计、软件开发、算法调参、算法迭代

在商业化落地方面,人形机器人也面临着巨大的挑战。精确改变物理世界难度大、精度差,任务柔性化、多样化性难以满足,真正的智能化程度远远达不到人类的30%,这些都使得人形机器人的商业化进程举步维艰。以 ASIMO 为例,作为上一代人形机器人之最,其商业化尝试最终未能取得成功。

新开发范式的突破与创新
面对传统开发范式的困境,人形机器人 + 具身智能的新开发范式应运而生。这种新范式以具身智能为核心,需要构建全新的 Pipeline 加速,模型导出、技能训练、驱动绑定、模型部署,面向异构平台构建通用方法,为人形机器人的发展带来了新的突破和创新。
与传统机器人系统范式相比,具身智能系统范式下的模型不仅仅是一个计算工具,而是直接嵌入到应用和服务之中,强调模型的深度集成;新范式针对具身智能开发了专门优化的计算架构、操作系统或芯片,以更高效地支持机器人任务,系统架构中引入了专门的中间件层,从而提高系统的灵活性和可扩展性。
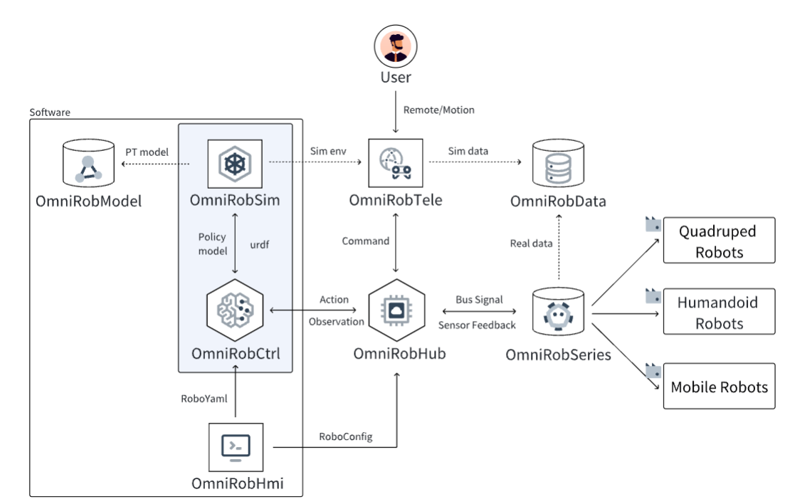
(一)具身操作系统 OpenLoongOS:新范式的基石
在新开发范式中,操作系统成为了关键的组成部分。OpenLoongOS 采用共享内存架构,实现软硬件解耦,确保大容量数据的实时交互。其软件框架集成 TVM、Pinocchio、RBDL、DDS、ETH 等多种依赖库,加速运动控制与模型部署。系统支持具身数据采集与存储,兼容多种人机交互终端。同时,OpenLoongOS 具备即插即用的模型部署能力,支持多模型切换与技能组合,依托 TVM 和 ONNX Runtime 架构,实现高效的大模型调度与长程任务执行。
OpenLoongOS SDK组件已在 GitHub 开源,供开发者自由下载、使用和二次开,其余部分正在准备开源中,有兴趣的朋友可点击访问 GitHub - loongOpen/loong_driver_sdk
(二)具身模型运行中枢 OmniHub:智能的核心枢纽
具身模型运行中枢 OmniHub 是新开发范式中的核心组件之一。它将传统的运控单元转变为模型输入输出的 Hub 接口,为神经网络提供观测值(Obs),并将神经网络的行动(Action)转换为执行器控制信号。 OmniHub 不仅支持具身模型的加速推理,还通过 TVM 架构和 Onnx runtime 架构,实现了多模型部署、多技能平滑切换,满足了长程任务组合与大模型调度的需求。此外,它还自集成了全链路的传感器与伺服单元驱动,覆盖了主流货架产品,实现了模块化集成。(OmniHub 准备开源中,敬请期待)
(三)模型加速训练平台 OmniSim:加速智能的进化
模型加速训练平台 OmniSim ,即为前段时间新发布的“格物”具身智能仿真平台(Unity-RL-Playground),是新开发范式中的另一个重要组成部分。它结合动力学建模和人体动作数据前馈信号,提升神经网络训练效率,减少探索空间,加速运动控制模型训练。平台提供向导式训练界面,可快速配置训练参数,并预设多种机器人运动模式和训练策略。此外,OmniSim 内置 50+ 训练案例,涵盖双足、轮足、四足、点足等不同机器人构型,支持通过配置文件快速调整物理尺寸和参数,实现高效便捷的模型训练。

“格物”具身智能仿真平台已在 GitHub 开源,供开发者自由下载、使用和二次开发。有兴趣的朋友可点击访问 https://github.com/loongOpen/Unity-RL-Playground
(四)具身机器人应用库 OmniSeries :赋能行业的开源力量
具身机器人应用库 OmniSeries 是新开发范式的重要成果之一。OmniSeries 是基于 OpenLoong 开源算法和具身开发范式的机器人应用库,致力于推动行业机器人开发。它通过提供全身运动控制和具身智能算法,支持人形、四足、轮足、双臂、无人车等多样化平台案例,同时依托 OmniHub 的硬件驱动能力,采用积木式、向导式配置方式,缩短新机器人研发周期,专注于具身模型训练和数据积累。平台还通过 OpenLoongOS 提供全链路的具身数据采集、标注和存储支持,推动数据驱动的行业闭环应用,促进开源 VLA 架构的实现。(OmniSeries 准备开源中,敬请期待)
结语
人形机器人+具身智能基础模型新开发范式的出现,标志着人形机器人领域进入了一个全新的发展阶段。通过模型训推与操作系统 OpenLoongOS 的结合、具身模型运行中枢 OmniHub 的核心枢纽作用、模型加速训练平台 OmniSim 的加速训练能力以及具身机器人应用库 OmniSeries 的开源赋能,人形机器人终将能够在更加复杂多变的环境中展现出更加灵活、自然的行为,进一步迈向真正实现具身智能的目标。
未来,随着技术的不断进步和创新,人形机器人将在更多领域发挥重要作用,为人类社会的发展带来更多的便利和福祉。让我们共同期待人形机器人+具身智能基础模型新开发范式所开启的智能新时代!
OpenLoong 开源社区提供了一个开放交流的平台,在这里,大家可以共同探讨机器人仿真的难点与创新点。本次技术稿件也将在开源社区进行共享,欢迎大家 点击下载PDF,一起进行交流。
更多推荐

 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)