abb工业机器人指令lf怎么用_工业机器人十万个怎么办-不清楚机器人MoveC圆弧运动指令怎么办?...
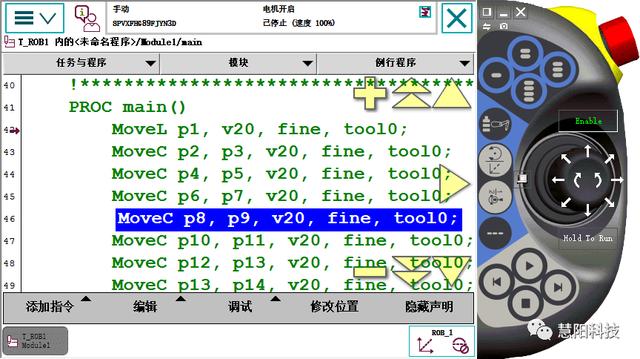
MoveC圆弧运动机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点三点决定一段圆弧,机器人运动状态可控,运动路径保持唯一,常用于机器人在工作状态移动。例如:MoveC p10 , p20 , v20 , fine , tool0;MoveC 运动类型(圆弧运动)p10 中间位置(数据类型robtarget)p20 目标位置(数据类型robtarget)v20 运行速度(单位mm/
·
MoveC圆弧运动
机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点三点决定一段圆弧,机器人运动状态可控,运动路径保持唯一,常用于机器人在工作状态移动。
例如:MoveC p10 , p20 , v20 , fine , tool0;
- MoveC 运动类型(圆弧运动)
- p10 中间位置(数据类型robtarget)
- p20 目标位置(数据类型robtarget)
- v20 运行速度(单位mm/s,数据类型speeddata)
- fine 转弯区尺寸(单位mm,数据类型zonedata)
- tool10 工具中心点TCP(数据类型tooldata)
MoveC运动指令应用
在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标和工件坐标。
此处我们使用默认的工具与工件坐标系进行讲解。
以绘制小兔子图案为例进行讲解。
图中兔子图案包含多条圆弧曲线,每一条圆弧曲线均可通过“MoveC”指令进行实现。
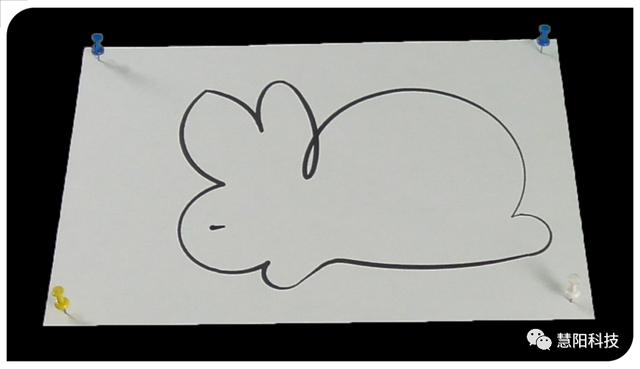
分析实现此图案需要多少圆弧。
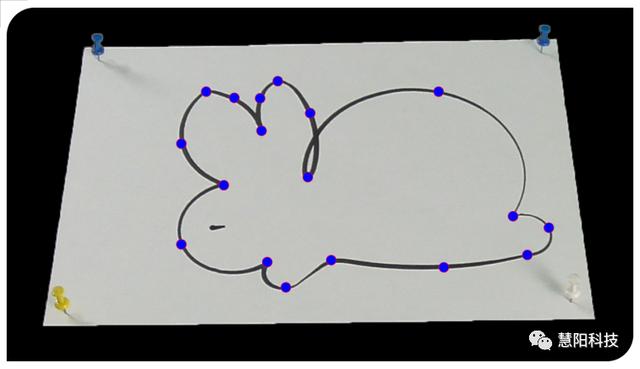
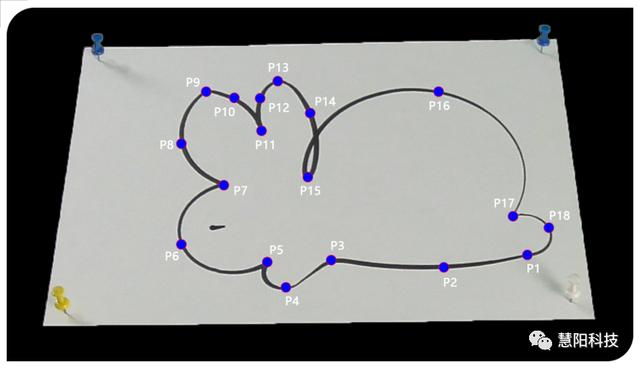
标记绘制圆弧所需要的全部点位。
运用MoveC指令实现图形绘制。
点击“ABB”菜单,进入“程序编辑”界面。
同以往章节一样,为目标点新建变量存储位置数据。
自定义更改运行速度。
自定义更改转弯区尺寸。
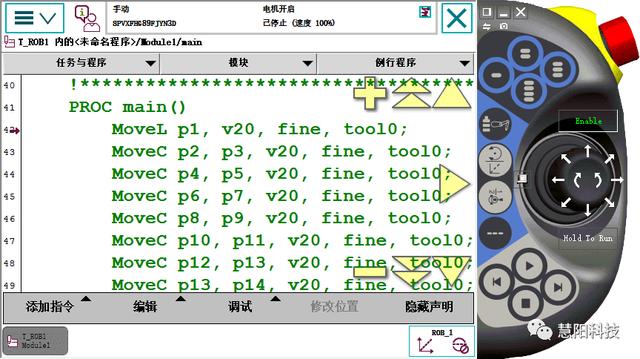
添加绘制图形所需的全部指令。
点击“PP移至Main”。
机器人上电后点击程序运行按钮,执行运动程序。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)