在ros中打开下载的功能包头文件具体信息_机器人操作系统ROS-Roboware Studio教程(ROS melodic)...
RoboWare Studio是专门针对ROS开发的集成开发环境,方便创建、初始化以及编译ROS的工作空间和功能包。一、下载方式:1 RoboWare官网:http://www.roboware.me/#/home(自己尝试过,暂时登不进去)2 网盘链接1: https://pan.baidu.com/s/18NJqUEoYzK4y23zFmKl5XA 提取码: nibq网盘链接2:https:/

RoboWare Studio是专门针对ROS开发的集成开发环境,方便创建、初始化以及编译ROS的工作空间和功能包。

一、下载方式:
1 RoboWare官网:http://www.roboware.me/#/home(自己尝试过,暂时登不进去)
2 网盘链接1: https://pan.baidu.com/s/18NJqUEoYzK4y23zFmKl5XA 提取码: nibq
网盘链接2:https://pan.baidu.com/s/1D169dFyf2OD3SFBZVZy3pQ 密码:3iuk
3 官方GitHub链接:TonyRobotics/RoboWare
二、安装步骤
1 安装前
(1)操作系统为ubuntu系统
(2)完成ROS系统安装
(3)安装pylint,支持python相关功能
sudo apt-get install python-pip
sudo python -m pip install pylint (4)安装clang-format-3.8或其他版本,支持clang-format相关功能
sudo apt-get install clang-format-3.82 安装
根据上面几种下载方式,下载RoboWare Studio,存放在Downloads文件夹下
进入Downloads文件,并进行安装
cd ~/Downloads
sudo dpkg -i roboware-studio_1.1.0-1514335284_amd64.deb3 安装后
直接在终端打开
roboware-studio三、基础使用
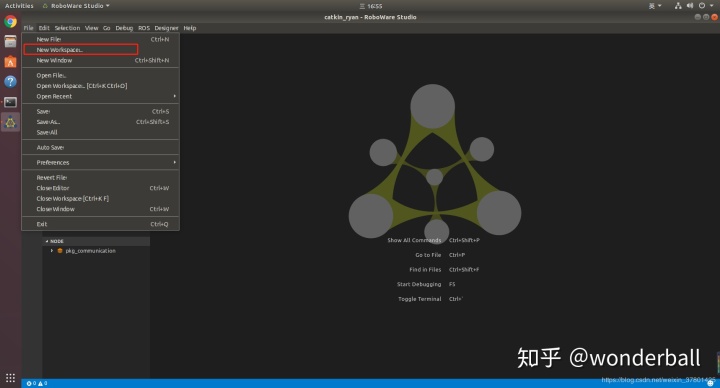
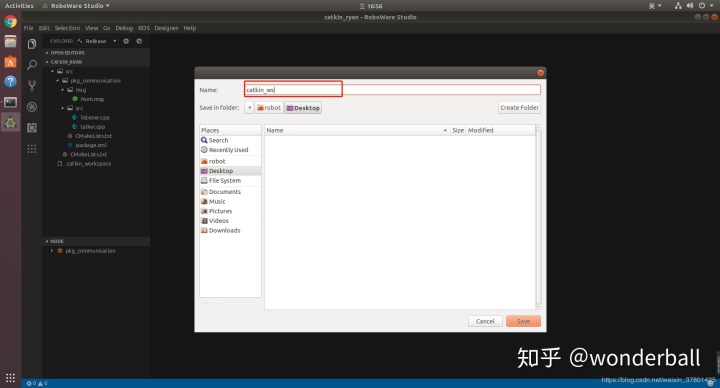
1 新建工作区
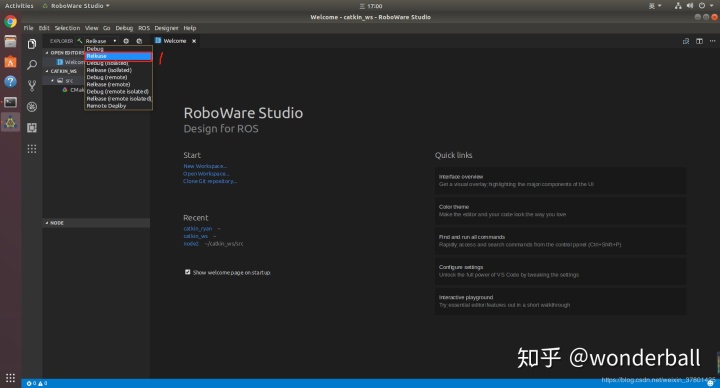
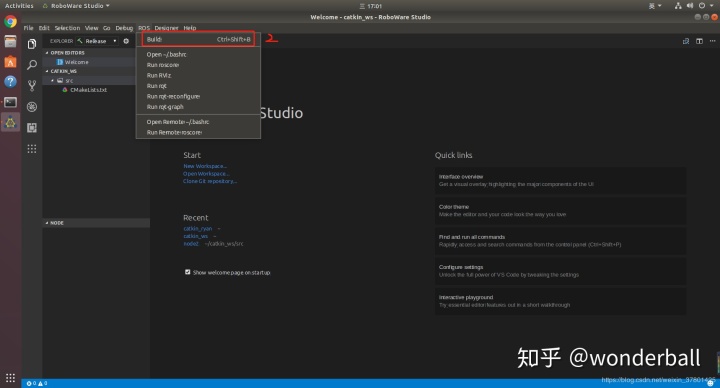
2 点击release,再进行build
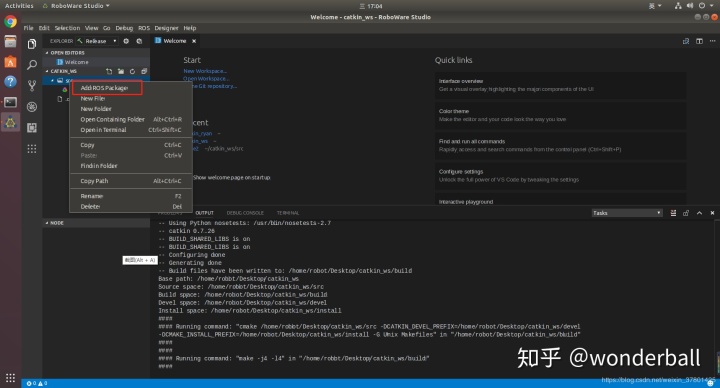
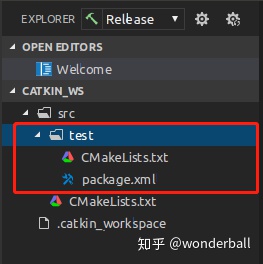
3 创建功能包
(1)右击src,点击Add ROS Package
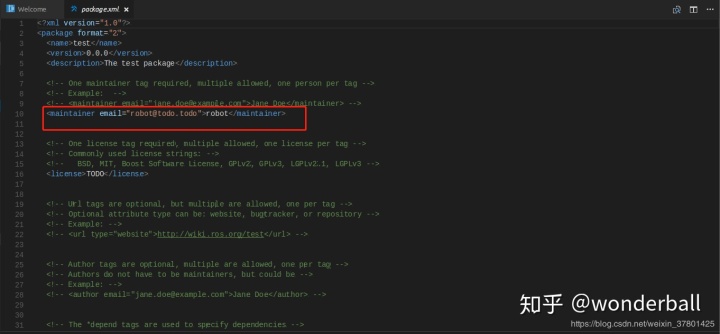
(2)更改package.xml信息(根据自己的邮箱填写),然后ctr+s进行保存
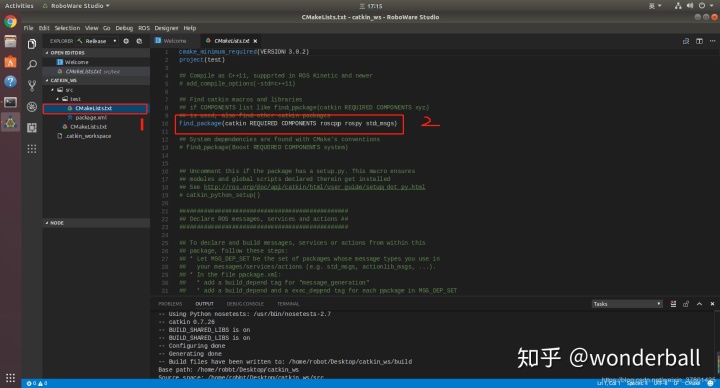
(3)编辑依赖的ROS包列表,一般添加roscpp,rospy,std_msgs,根据自己实际需要进行填写
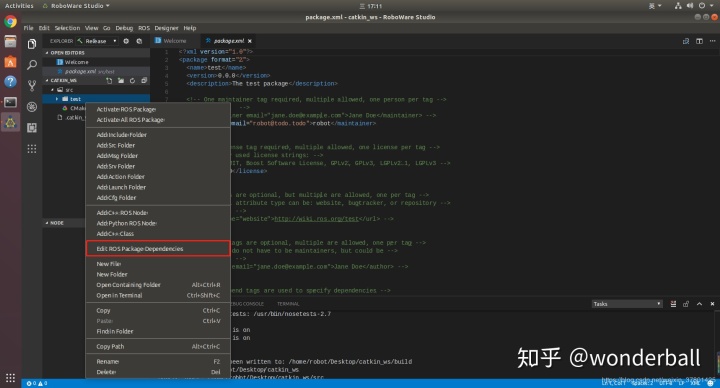

可以查看CMakeList.txt,依赖关系已经进行更新
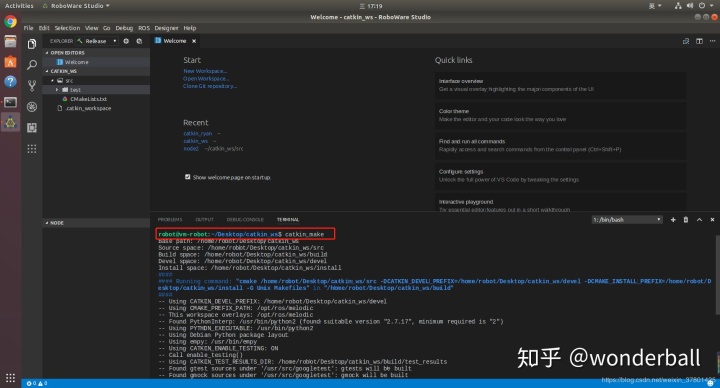
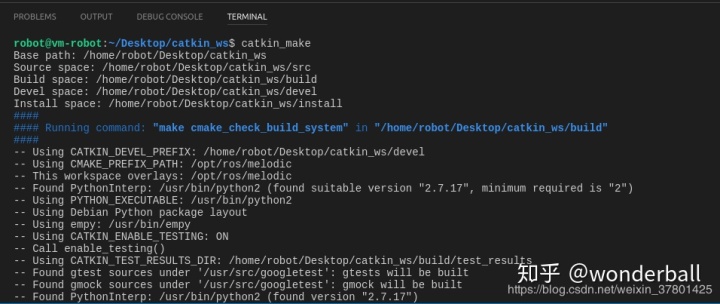
(4)ctr+`,调出terminal,输入catkin_make,对test功能包进行编译
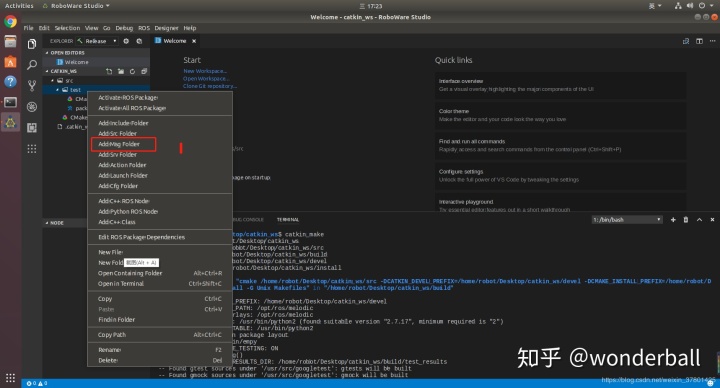
4 创建ROS消息
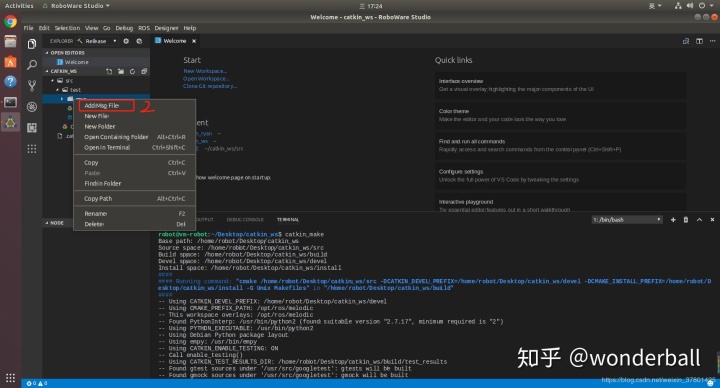
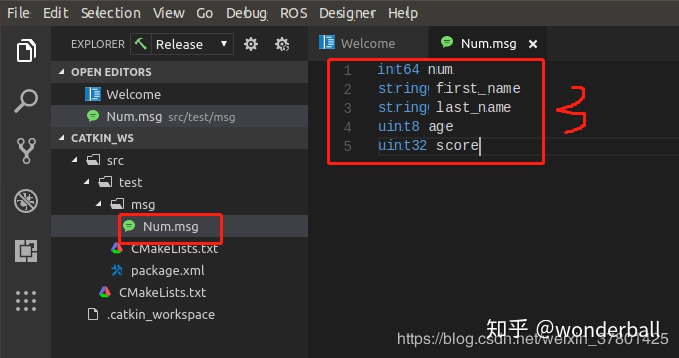
此时CMakeLists.txt 会自动加入以上设置!!!
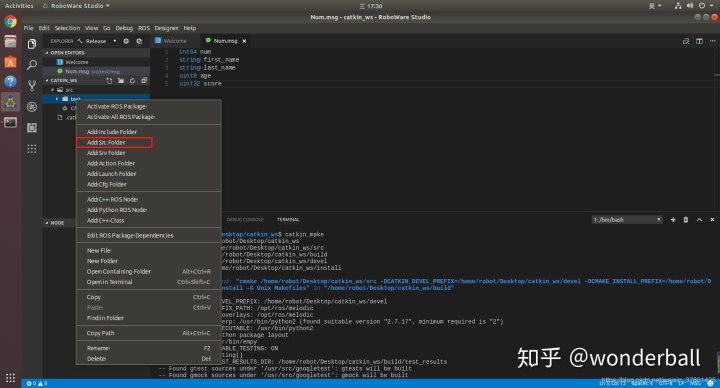
5 创建src文件夹
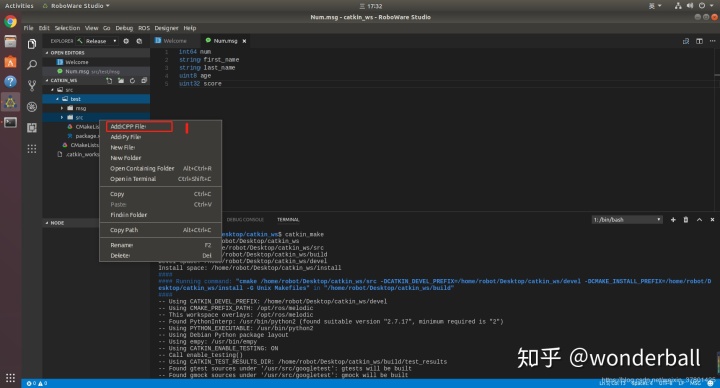
6 创建消息发布器talker和订阅器listener(严格按照此步骤!!!)
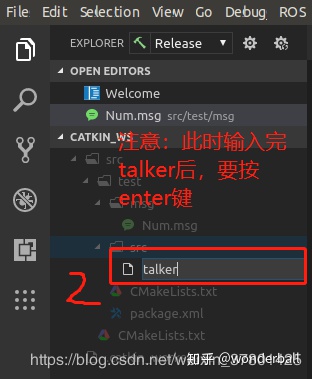

同理,创建listener.cpp
7 输入程序,并分别保存
talker.cpp
#include listener.cpp
#include 8 运行catkin_make,编译成功
9 终端输入(非常重要!!!)
source devel/setup.bash 10 终端输入roscore
roscore11 分别开启talker和listener订阅器
test talker
rosrun 实现消息的传输啦!!!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)