igxe本地机器人怎么用_创建机器人程序数据的方法你知道吗?
我们都知道,在对机器人进行正式编程前,要构建必须的编程环境,比如创建运行程序、创建三个必要的程序数据十分重要(工具数据、工件数据、和机器人的载荷数据)等。下面介绍一下如何创建上面讲到的三个重要的程序数据(tooldata,wobjdata,loaddata)。首先说一下工具数据(tooldata)的创建,我们知道工具数据用于记录安装在机器人第六轴(以六轴工业机器人为例)法兰盘上的工具中心点、质量、
我们都知道,在对机器人进行正式编程前,要构建必须的编程环境,比如创建运行程序、创建三个必要的程序数据十分重要(工具数据、工件数据、和机器人的载荷数据)等。下面介绍一下如何创建上面讲到的三个重要的程序数据(tooldata,wobjdata,loaddata)。
首先说一下工具数据(tooldata)的创建,我们知道工具数据用于记录安装在机器人第六轴(以六轴工业机器人为例)法兰盘上的工具中心点、质量、重心等参数的数据,机器人在其法兰盘中心都有一个预定义的工具数据tool0。
工业机器人工具数据创建
创建工具坐标有两种方法:第一种方法是在工作站中创建;另一种方法是在虚拟示教器中创建。
1,导入3D模型
在工作站中创建工具数据,我们首先导入3D工具模型(可以用solidworks三维软件,Pro/E机械设计软件,UG应用设计软件生成复杂的3D模型)。我们以仿真软件自带的简单模型为例说明,首先选择“基本”选项卡,然后单击“导入几何体”按钮,再选择“浏览几何体”选项,选择导入的几何体,我们以选择焊枪模型为例。
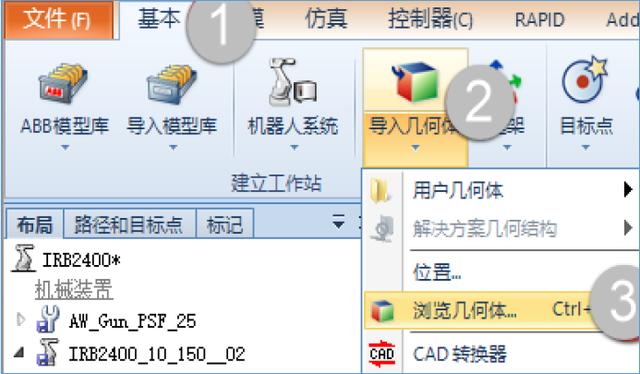
选择导入几何体模型
导入几何体
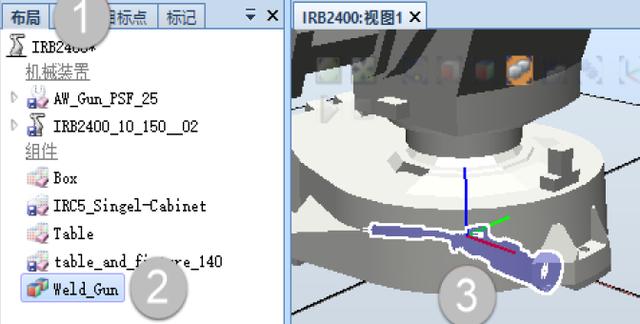
2、创建本地原点
在导入3D模型后,其自身的坐标原点有可能不在机器人法兰盘接触端面的中心点上,该坐标方向也不一定符合机器人的安装要求,因此需要重新设定本地原点。那么如何设定本地原点呢?首先我们要调整视图,暂时隐藏机器人,只显示导入的3D工具模型,并让3D工具模型位于地板之上。在布局窗口中,右键单击3D工具模型(比如焊枪Weld-Gun),在弹出的快捷键菜单中选择“修改”和“设定本地原点”。单击“设置本地原点”对话框中位置X值输入框,让光标置于X值输入框。选择3D模型底座表面,再单击“设置本地原点”对话框中的“应用”按钮。3D模型原点将自动移到底座圆的中心。下面要设定位置,右键单击“3D工具模型”在快捷菜单中选中“位置”和“设定位置”选项。工具固定端移动到大地坐标原点,设置X,Y,Z值为0,并围绕Y轴Z轴各旋转90度。再次设置工具原点,右击3D工具模型焊枪,然后选中“修改”“设定本地原点”选项。对话框中位置和方向的值全部设为0,单击“应用”按钮。
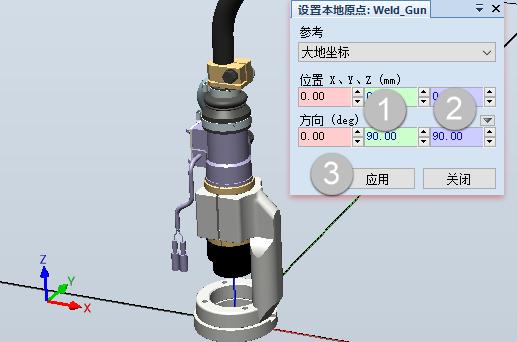
3D工具模型与大地坐标方向一致
3、创建工具坐标系
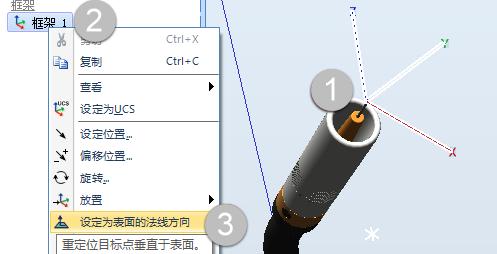
在“基本”选项卡中选择“框架”,点击“创建框架”选项,用“选择表面”和“捕捉圆心”的功能,捕捉焊丝中心点为工具坐标原点,然后右键单击“框架—1”,在弹出的快捷菜单中选择“设定为表面的法线方向”命令。在将光标置于“表面或部分”复合框中,在“接近方向”选项组中选择Z方向,利用“选择平面”捕捉工具选择焊丝末端平面,单击“应用”按钮。此时工具坐标系就创建完成了。如下图所示。
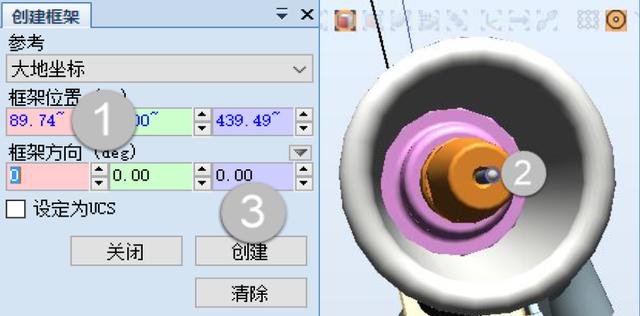
创建框架并捕捉框架原点
需要调整新生成的框架

捕捉表面法线方向
4、在虚拟示教器中创建工具数据
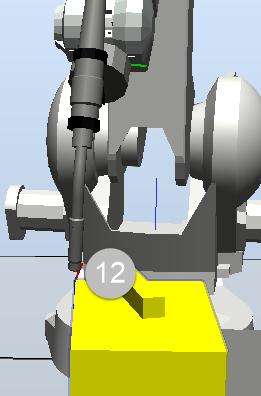
以焊枪(Weld-Gun)为例,可以用4点或6点法定义工具数据,下面以4点法为例,定义焊枪工具TCP点,使焊枪TCP点尽量靠近圆锥顶端,向其左、右、前、顶端方向移动。用示教器调整机器人时,正面朝向机器人,示教器上的方向箭头与机器人移动方向一致,创建一个圆锥体并调整视角,移动圆锥体放置合适的位置,单击“点1”选择修改位置,同样的 方法,用示教器将焊枪调整到另一个姿态,定义“点2”、“点3”、“点4”。,完成定以后,单击“确认”按钮。
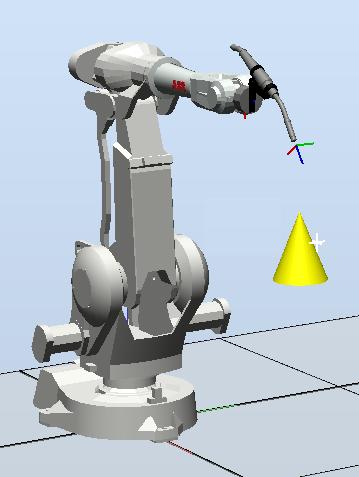
工具示教
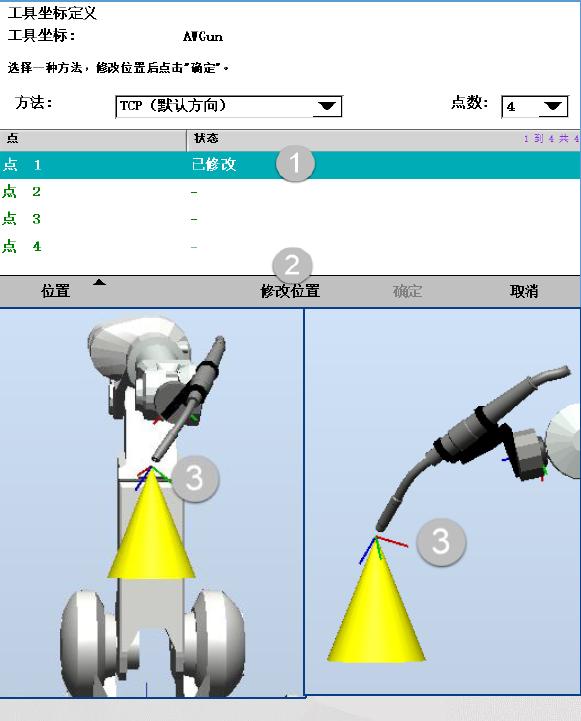
修改位置
完成工具定义后,使用重定位运动模式检查此前所创建的工具坐标系的精度,在正常情况下,无论操纵机器人朝那个方向运动,工具始终围绕着同一个点做不同姿态的变换。反之如果误差大需要重新修改坐标系。
5、工件数据(Wobjdata) 的创建
机器人末端装置的运动其实就是TCP点的运动,运动的路径也是相对于工件坐标系的。那么创建工件坐标系有两种方法,一种是在工作站中创建、另一种是在虚拟示教器中创建。那么今天给大家说说如何在虚拟示教器中创建工件数据,一般用三点法设定工件坐标。首先以工件的某个特殊点(例如角点、圆心、工件的左上角等)来确定工件坐标的原点X1,再在X轴的正方向上确定一点为X2,用右手法则来确定Y轴的正方向。然后在Y轴正方向的一边取一点决定了Y轴的方向,该点是X轴与Y轴构成平面上Y轴正方向上的任意一点,X轴与Y轴确定后,Z轴方向自动定下来。

示教器中创建工件数据
工件坐标原点
6、有效载荷数据(Loaddata)
有效载荷数据记录了加载物的质量、重心两个数据。机器人工具类型分为两大类,一类像焊枪,此类工具在生产中参数保持不变,一般使用系统默认值Load0,还有一类像搬运工具,加载货物后,工具质量、重心等都发生了变化,需要设置有效载荷。其步骤如图所示:
首先打开示教器创建Loaddata数据。

手动操纵示教器
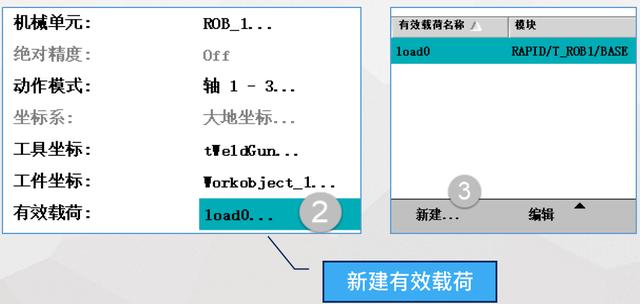
新建有效载荷
至此,通过以上步骤就把工具数据、工件数据、和机器人的载荷数据创建完毕。把机器人I/O配置完后就可以编写RAPID程序了。

焊接机器人
装配机器人

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)