

【硬件工程师】芯片手册阅读-电阻式触摸屏控制芯片
目录一、串口通讯二、触摸报告协议三、芯片的配置寄存器介绍四、芯片的读/写命令格式命令配置示例以AR1000系列电阻式触摸屏控制器的ART1011-I/SS为例哈,芯片数据手册:PDF.js viewerhttps://www.semiee.com/static/js/pdfjs-1.10.88-dist/web/viewer.html?file=https%3A%2F%2Fwww.semiee.
目录
以AR1000系列电阻式触摸屏控制器的ART1011-I/SS为例哈,
 https://www.semiee.com/static/js/pdfjs-1.10.88-dist/web/viewer.html?file=https%3A%2F%2Fwww.semiee.com%2Ffile%2FSource15%2FMicrochipTechnology-AR1011-ISS.pdf#pagemode=none
https://www.semiee.com/static/js/pdfjs-1.10.88-dist/web/viewer.html?file=https%3A%2F%2Fwww.semiee.com%2Ffile%2FSource15%2FMicrochipTechnology-AR1011-ISS.pdf#pagemode=none芯片元件:
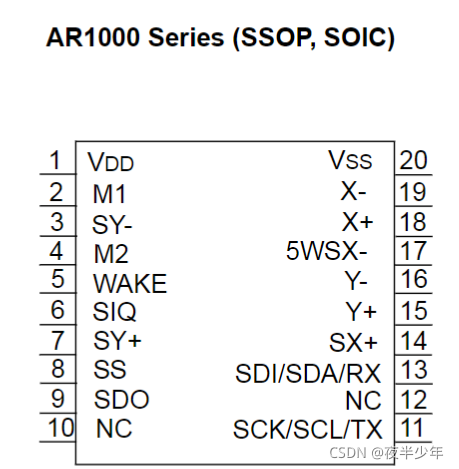
这款芯片的11脚(SCK/SCL/TX)、13脚(SDI/SDA/RX)是数据通讯引脚,有I2C/SPI/UART三种通讯协议可供选择(通过对M1、M2引脚的硬件配置),我选择的采用UART串口该协议进行通讯。
因此,我们直接翻到“UART通讯”这一节,如下截图:
一、串口通讯
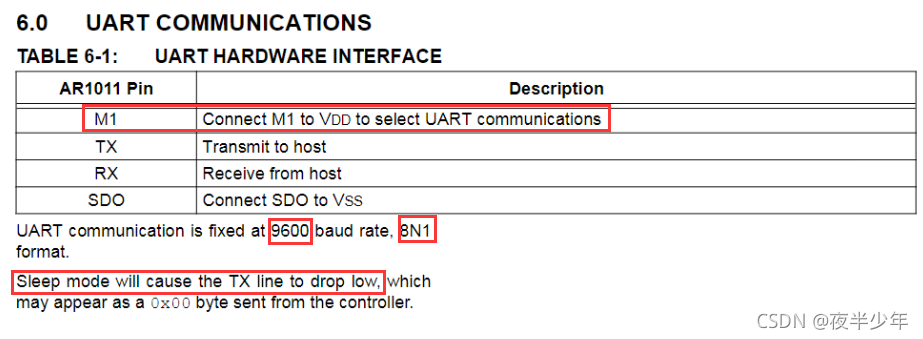
M1连接到VDD(芯片电源端)即可选择UART作为芯片通讯协议。
UART的波特率为9600波特率。
“8N1”的含义:8:表明8位数据位;N:表明(NO parity)即无奇偶校验;1:表明1位停止位
睡眠模式会导致TX引脚拉低,实测检验到:刚开机无任何触摸状态时,处于睡眠模式TX端电压为0V状态。
二、触摸报告协议
紧接着UART通讯章节,我们可以看到触摸传输协议该章节,如下截图:
上面一大堆英文就是用来解释底下这个协议表的,大致的意思是:
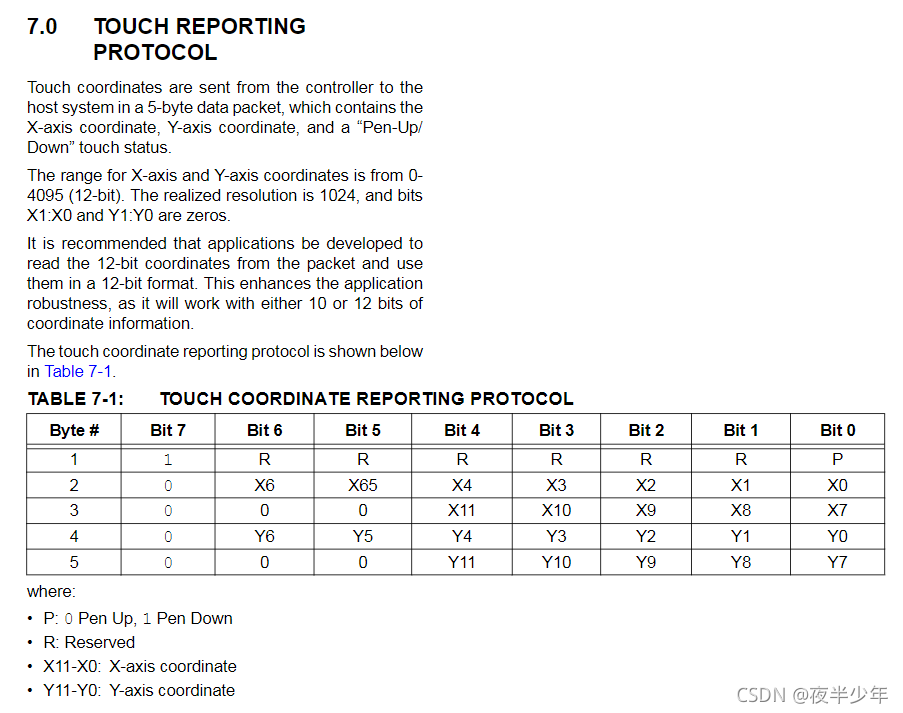
触摸坐标 以 5 bytes数据包的形式从触摸芯片端发送到主机系统,其中包含 X 轴坐标、Y 轴坐标和“Pen-Up/Down”触摸状态 三类数据。
其中,X 轴和 Y 轴的范围坐标范围均为 0 ~ 4095(12 bit)。 触摸坐标分辨率为1024,bitsX1:X0 和 Y1:Y0 为零。
建议开发应用程序从数据包中读取 12 位坐标并以 12 位格式使用它们。 这增强了应用程序的鲁棒性,因为它将使用 10 位或 12 位坐标信息。
英文底下的表格是触摸坐标报告协议。
第1字节:1 x x x x x x P
该字节的有效位为 最低位‘P’: 存储触摸状态,0:Pen-Up;1:Pen-Down
第2、3字节存储 X 轴坐标(12bits):
- 0 X6 X5 X4 X3 X2 X1 X0
- 0 0 0 X11 X10 X9 X8 X7
第4、5字节存储Y 轴坐标(12bits):
- 0 Y6 Y5 Y4 Y3 Y2 Y1 Y0
- 0 0 0 Y11 Y10 Y9 Y8 Y7
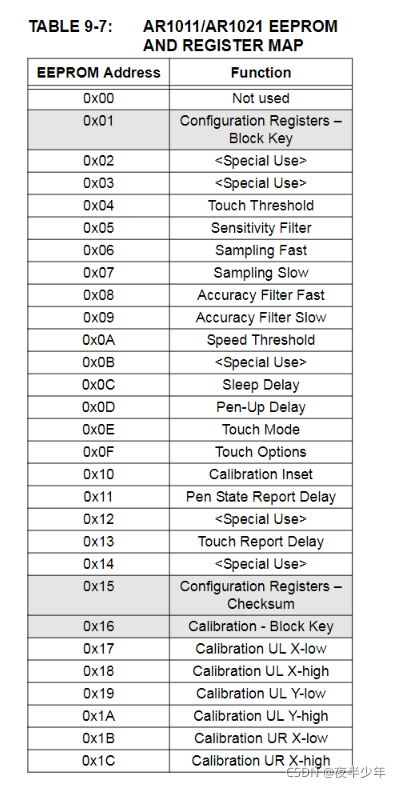
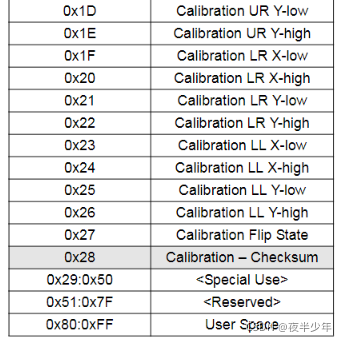
三、芯片的配置寄存器介绍
CONFIGURATION REGISTERS 第8章节 ,截图如下(截不全)。
表格前的说明:
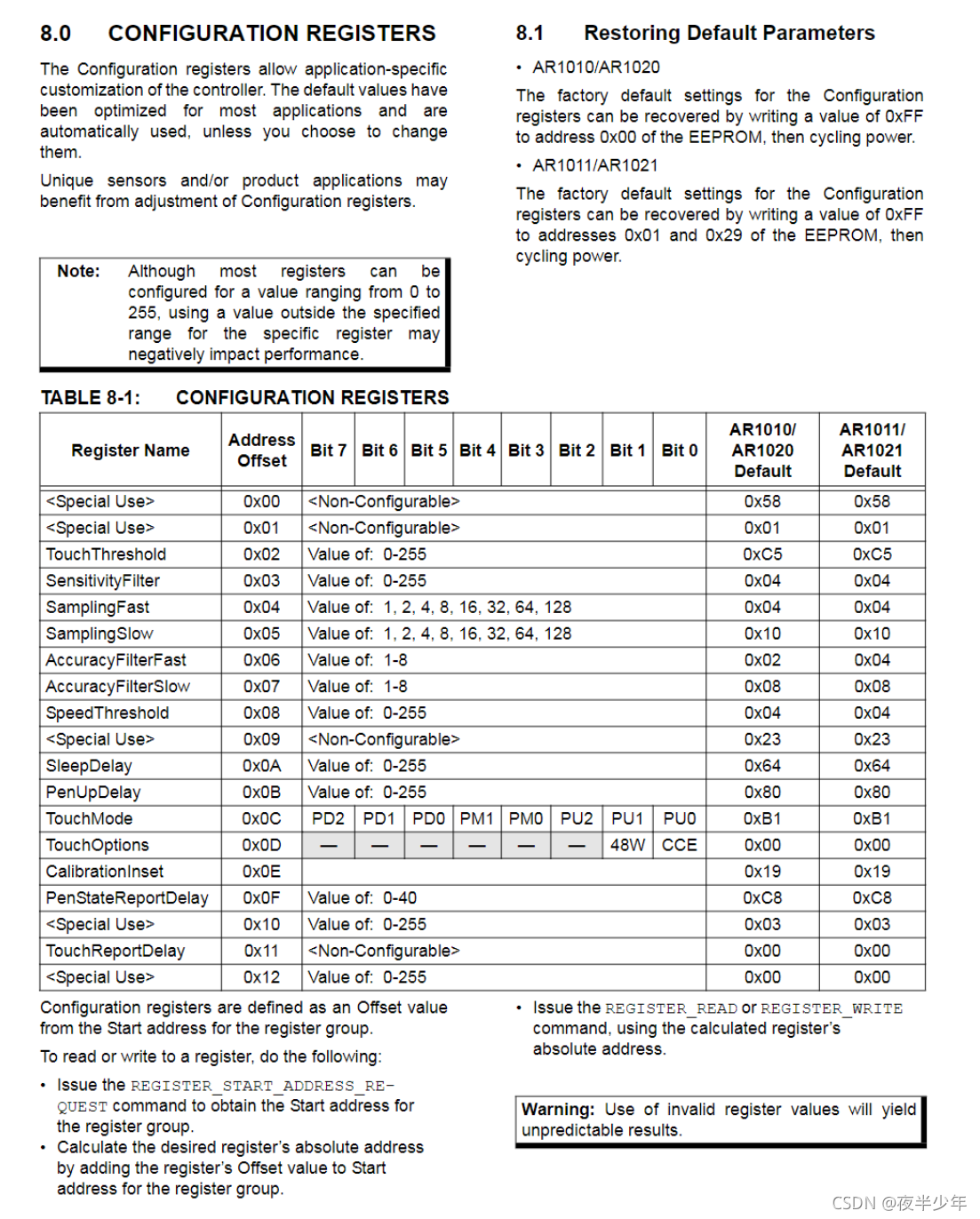
通过对配置寄存器值的调整,我们可以对触摸芯片进行定制性应用。我们可以用已优化好的默认值(默认自动使用)。但是配置寄存器的值时我们尽可能不要超出指定范围(表格有说明)
关于我们选择的AR1011芯片的配置寄存器,该章节的8.1章节也进行了下说明:
翻译过来就是:
通过将 0xFF 的值写入 EEPROM 的地址 0x01 和 0x29,重新上电,就可恢复配置寄存器的出厂默认设置。
表格陈述了将近15个配置寄存器,列出了各自的地址偏移、寄存器取值范围以及相应芯片配置寄存器的默认值:SamplingFast 寄存器设置,当确定触摸移动速度较快时。
- TouchThreshold(阈值上限)
- SensitivityFilter(触摸灵敏度 上限)
- SamplingFast (触摸测量样本平均值的级别(快移动))
- SamplingSlow
- AccuracyFilterFast(触摸精度增强过滤器的级别(快移动))
- AccuracyFilterSlow
- SpeedThreshold(触摸移动时速度的阈值)
- SleepDelay
- PenUpDelay(触摸抬起的持续时间)
- TouchMode(触摸状态机,后面有个表格描述)
- TouchOptions(“触摸”相关的选项位,触摸校准使能位,后面有个表格描述)
- CalibrationInset(触摸校准设置)
- PenStateReportDelay(设置发送顺序触摸数据之间的延迟时间设置)
- TouchReportDelay(连续触摸数据包之间的延迟时间设置)
表格底下有个备注说明(实则在教我们怎么用这个表格):
英文翻译过来就是:
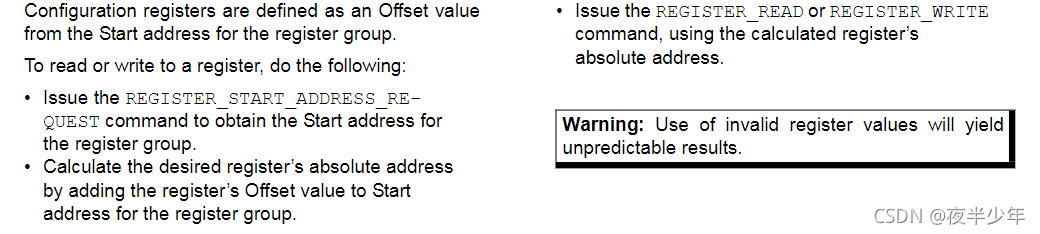
如果要对上述配置寄存器进行读取或写入,操作如下:
- 首先发出 REGISTER_START_ADDRESS_RE-QUEST 该命令获取寄存器组的起始地址。
- 然后,计算出所需配置寄存器的绝对地址——寄存器组的起始地址 + 配置寄存器的偏移值。
- 最后,使用计算出的寄存器绝对地址发出 REGISTER_READ 或 REGISTER_WRITE 命令。
配置寄存器TouchMode 详细描述:(点下、抬起和触摸)
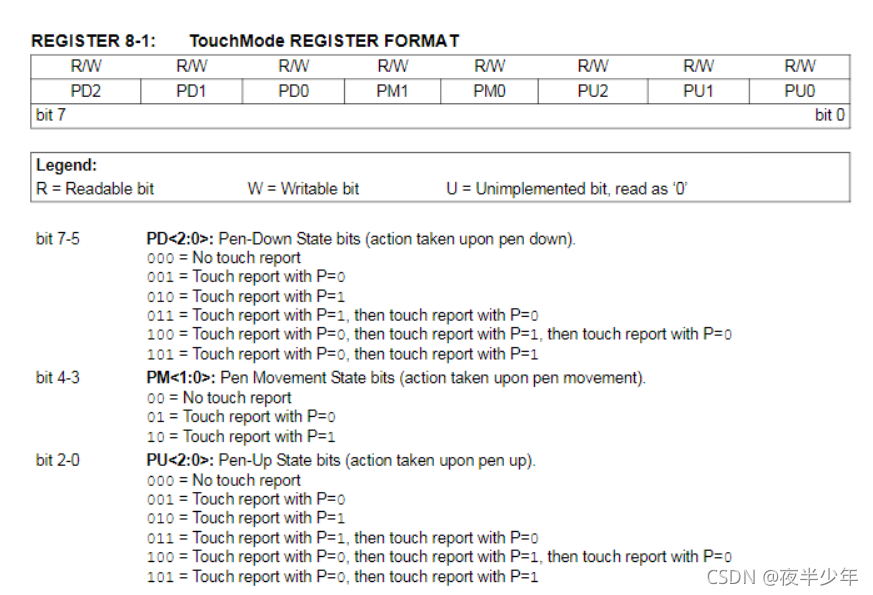
TouchMode 的几个典型设置示例如下:
- 初始触摸时按下 P=1,然后触摸期间按下 P=1 流,最后触摸释放时最终抬起 P=0。那么,触摸模式 = 0b01010001 = 0x51。
- 在初始触摸时抬起 P=0,然后按下 P=1,最后触摸期间按下 P=1 的流,然后在触摸释放时最终笔向上 P=0。 那么,触摸模式 = 0b10110001 = 0xB1。
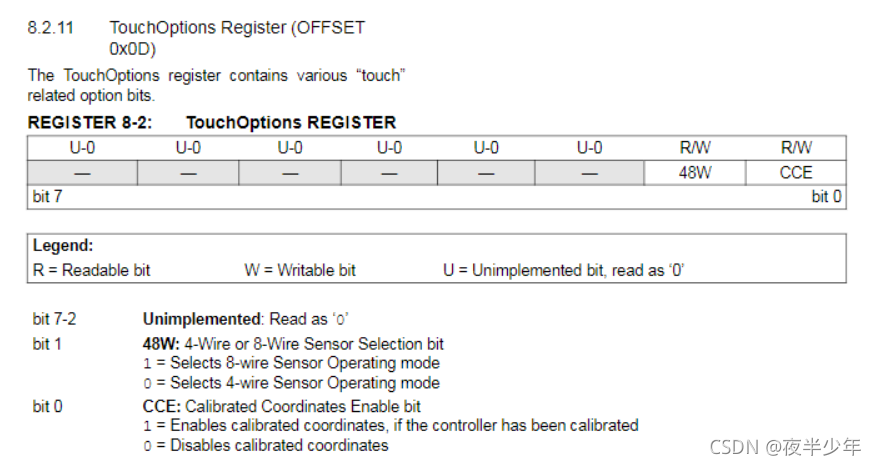
CCE: Calibrated Coordinates Enable bit
1 = Enables calibrated coordinates, if the controller has been calibrated
0 = Disables calibrated coordinates
CCE:校准坐标启用位
1 = 启用校准坐标,如果控制器已校准
0 = 禁用校准坐标
四、芯片的读/写命令格式
我们针对性的看我们的AR1011芯片的部分
例子:
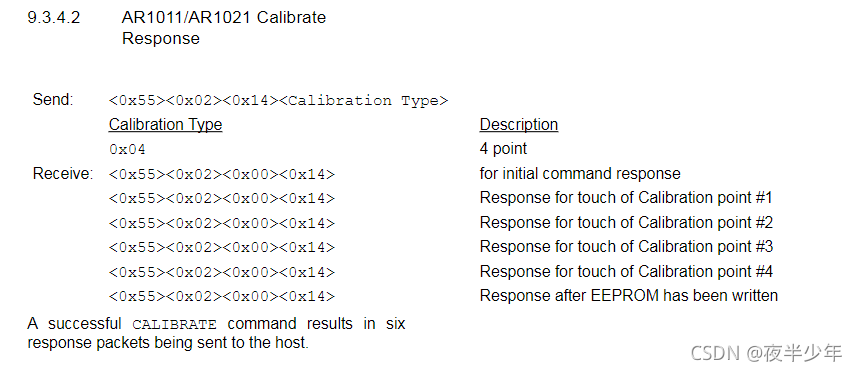
固定设置好校准数据、执行加载并使用固定校准值:
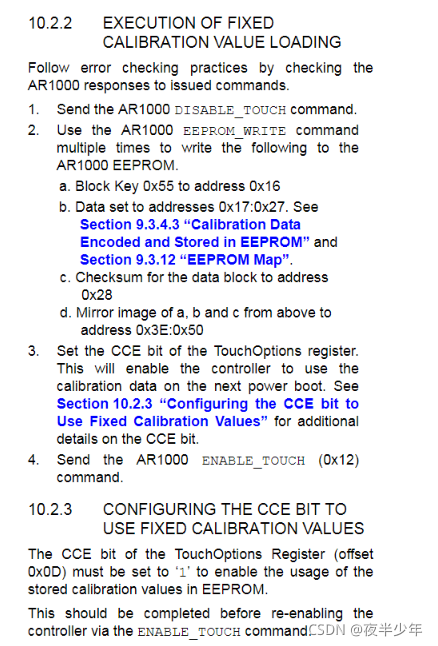
命令配置示例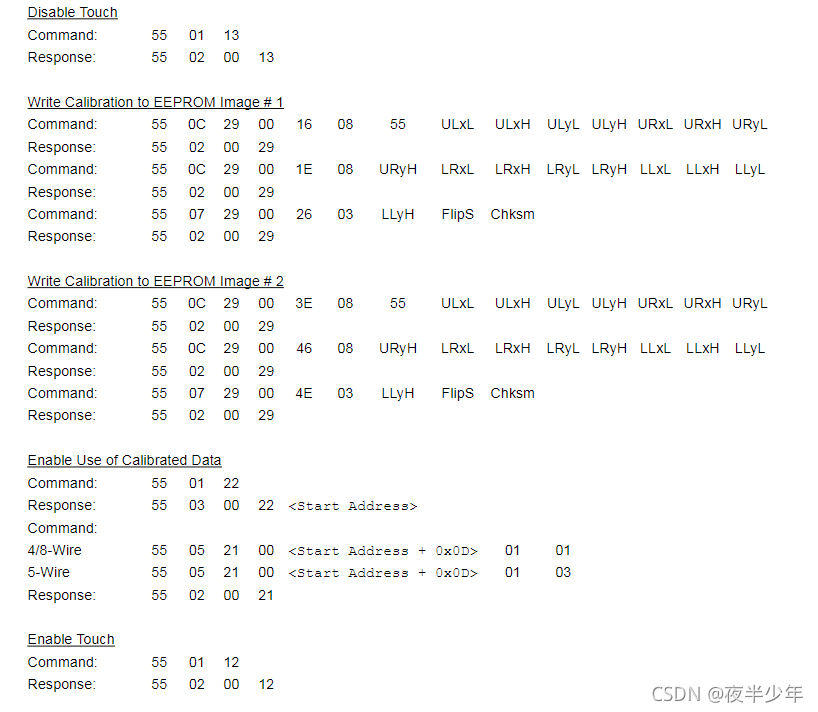
更多推荐

 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)