
【毕业设计】基于卷积神经网络的道路病害检测 人工智能 深度学习 Python 目标检测 机器视觉 计算机视觉 数据集 YOLO
毕业设计选题:道路病害检测系统利用深度学习技术,旨在自动识别和分类道路病害,提升城市交通管理效率。数据集包括多个分类:裂缝、大坑、小坑、交通标志(左箭头、禁止停车、限速等)以及其他相关特征(如车辙、路灯和人行横道)。在数据集准备完成后,项目首先进行环境配置,创建虚拟环境并安装必要的深度学习库和YOLO工具。随后,使用YOLO模型进行训练,系统学习道路病害的特征,训练完成后保存模型。接着,进行模型评
一、背景意义
道路病害检测在现代城市管理中具有重要的现实意义。随着交通流量的增加和车辆使用频率的提升,道路的损坏和病害问题日益突出。这不仅影响了交通安全,还对公共设施的使用效率和城市形象造成了负面影响。因此,及时、准确地识别和评估道路病害成为城市管理者面临的一项重要任务。数据集包括多个分类,。这些分类为系统提供了全面的道路病害信息,有助于管理者针对不同问题采取适当的修复和维护措施。通过深度学习技术,本项目旨在自动识别和分类各种道路病害,提升检测效率和准确性。这一系统能够实时监控道路状况,降低人工巡查的工作量,及时发现潜在的安全隐患,确保行车安全。
二、数据集
2.1数据采集
数据采集是构建道路病害检测数据集的第一步,主要包括以下几个方面:
-
确定数据来源:选择适合的图像来源,包括现场拍摄的照片、公共交通监控视频、无人机航拍等,以确保样本的多样性和代表性。
-
收集图像:获取大量包含各种道路病害的图像,确保样本包括裂缝、大坑、小坑、交通标志(如左箭头、禁止停车、限速等)及其他相关分类,样本数量应充足,以便模型学习到有效的特征。
-
保证多样性:在采集过程中,注意不同道路类型(如城市道路、高速公路、乡村小路等)、光照条件、天气状况和拍摄角度,以增强数据集的适用性。
数据清洗是确保数据质量的重要环节,主要步骤包括:
-
去除重复数据:检查数据集中是否存在重复或高度相似的图像,并剔除这些冗余样本,以避免对模型训练造成干扰。
-
筛选质量不佳的图像:剔除模糊、曝光过度或不足、不符合分类标准的图像,确保剩余图像的清晰度和可用性。
-
分类整理:将收集到的图像根据病害类型进行初步分类,确保数据集中包含裂缝、坑洞、交通标志等多种类别,以便于后续的标注和处理。
2.2数据标注
数据标注是将清洗后的图像进行分类和标记的过程,主要步骤包括:
-
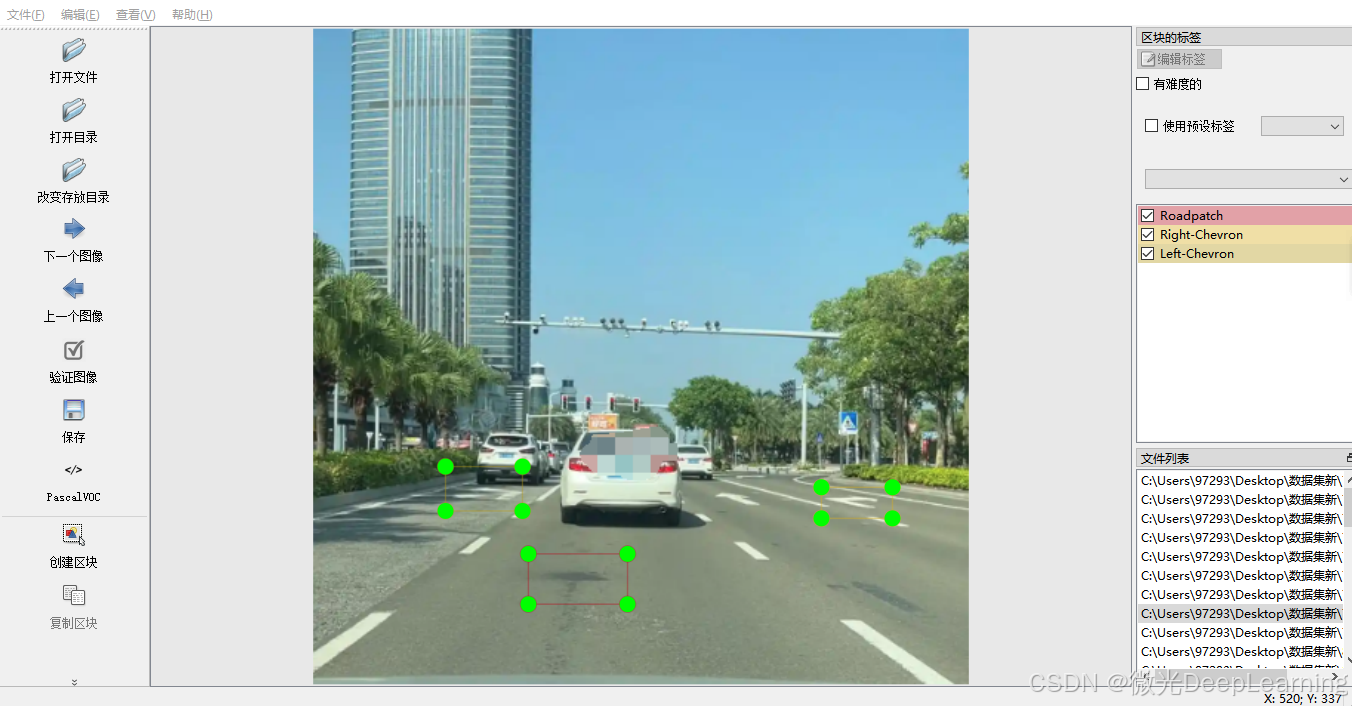
选择标注工具:使用专业的图像标注工具(如LabelImg、VGG Image Annotator等)对图像进行标注,方便用户对图像进行框选和分类。
-
标注类别:对每张图像进行标注,将其标记为相应的类别,如裂缝、大坑、小坑、各类交通标志等,并绘制边界框以准确包围每个目标。
-
复核与修正:在标注完成后,进行数据审核,确保标注的准确性和一致性,必要时对标注结果进行修改和调整,以提高数据集的质量。
在使用LabelImg标注道路病害检测数据集的过程中,标注者面临显著的复杂性和大量的工作量。数据集包含多个分类,如裂缝、大坑、小坑和各种交通标志等。标注者需仔细审视每张图像,准确识别目标并绘制边界框,确保标注的准确性和一致性。尤其在同一图像中存在多个目标时,标注工作变得更加复杂。初步标注后,还需进行复核和交叉检查,以确保数据质量。整个过程耗时且要求高度专注,为后续模型训练提供高质量的数据支持。
包含2287张图片,数据集中包含以下几种类别
裂缝:道路表面的裂纹。
左箭头:指示左转的交通标志。
标志牌:指示特定交通信息的标志。
大坑:道路上的大型凹陷。
小坑:道路上的小型凹陷。
禁止停车:指示禁止停车的标志。
坑洞:道路上出现的凹陷。
剥落:指路面材料的脱落。
右箭头:指示右转的交通标志。
路面修补:修补过的道路区域。
车辙:道路上因车辆碾压而产生的凹槽。
限速:指示限速的交通标志。
减速带:道路上的减速设施。
路灯:用于照明的街道灯。
交通信号灯:用于指挥交通的信号灯。
掉头:指示可以掉头的标志。
人行横道:供行人过马路的标线。
2.3数据预处理
在标注完成后,数据通常还需要进行预处理以确保其适合模型的输入格式。常见的预处理步骤包括:
- 数据清洗:去除重复、无效或有噪声的数据。
- 数据标准化:例如,对图像进行尺寸调整、归一化,对文本进行分词和清洗。
- 数据增强:通过旋转、缩放、裁剪等方法增加数据的多样性,防止模型过拟合。
- 数据集划分:将数据集划分为训练集、验证集和测试集,确保模型的泛化能力。
在使用深度学习进行训练任务时,通常需要将数据集划分为训练集、验证集和测试集。这种划分是为了评估模型的性能并确保模型的泛化能力。数据集划分为训练集、验证集和测试集的比例。常见的比例为 70% 训练集、20% 验证集和 10% 测试集,也就是7:2:1。数据集已经按照标准比例进行划分。
标注格式:
- VOC格式 (XML)
- YOLO格式 (TXT)
yolo_dataset/
│
├── train/
│ ├── images/
│ │ ├── image1.jpg
│ │ ├── image2.jpg
│ │ ├── ...
│ │
│ └── labels/
│ ├── image1.txt
│ ├── image2.txt
│ ├── ...
│
└── test...
└── valid...
voc_dataset/
│
├── train/
│ ├───├
│ │ ├── image1.xml
│ │ ├── image2.xml
│ │ ├── ...
│ │
│ └───├
│ ├── image1.jpg
│ ├── image2.jpg
│ ├── ...
│
└── test...
└── valid...三、模型训练
3.1理论技术
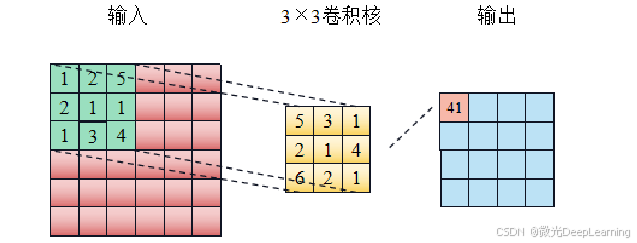
卷积神经网络(CNN)是一种常用于视觉图像分析的深度学习模型,实际上是一种深度前馈神经网络,结合了卷积运算和深层结构,展现出强大的处理能力。CNN能够通过各层之间的相互作用有效提取目标特征,因此逐渐成为图像识别和目标检测等计算机视觉任务的首选模型。卷积层是CNN的核心部分,利用卷积核进行特征提取,通过在输入图像上进行局部连接的点积运算,生成特征图。每个卷积核的数量决定了输出特征图的深度,尽管浅层卷积能提取到一些局部特征(如轮廓和边界),但由于感受野较小,无法捕捉到完整的目标特征,因此需要增加网络深度以提取更丰富的特征信息。
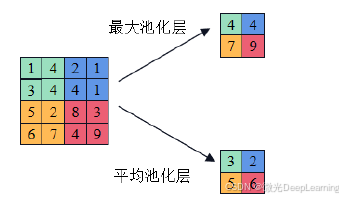
池化操作是CNN中常用的降采样方法,旨在减少特征图的尺寸,降低计算复杂度。由于相邻区域的特征相似,保留全部特征会浪费计算资源并引入不必要的参数。池化通过滑动窗口在特征图上进行操作,关键参数包括过滤器大小和步长,决定了每次滑动所涵盖的区域和特征概要值的采样。通过池化,CNN能够有效保留重要信息,同时减少特征图的维度,提升模型的训练效率。
激活函数层通常位于卷积层或全连接层后,用于引入非线性。卷积层和全连接层的线性组合如果不使用非线性激活函数,将限制网络的特征提取能力。早期使用的Sigmoid激活函数在二分类问题中表现良好,但在其他情况下,由于其导数接近于零,导致梯度消失问题。后来的tanh激活函数改善了这一点,但同样存在梯度消失的问题,因此在现代网络中,ReLU及其变体被广泛应用,以增强网络的学习能力和收敛速度。全连接层在CNN中扮演着分类器的角色,通过与前一层的所有卷积核全连接,实现对提取特征的线性组合。
3.2模型训练
在道路病害检测系统的数据集准备好后,接下来的步骤包括环境配置、模型训练和模型评估。首先,环境配置是确保项目顺利进行的基础。创建一个虚拟环境并安装必要的深度学习库和YOLO相关工具是第一步。完成安装后,需要编写数据集配置文件,以便YOLO模型能够正确加载数据。
# 创建并激活虚拟环境
python -m venv yolov5_env
source yolov5_env/bin/activate # Linux/Mac
# yolov5_env\Scripts\activate # Windows
# 安装必要的库
pip install torch torchvision
pip install opencv-python
pip install matplotlib
pip install pandas
pip install tqdm
# 创建数据集配置文件
echo "train: ./train/images" > data.yaml
echo "val: ./val/images" >> data.yaml
echo "nc: 14" >> data.yaml # 类别数量
echo "names: ['裂缝', '左箭头', '标志牌', '大坑', '小坑', '禁止停车', '坑洞', '剥落', '右箭头', '路面修补', '车辙', '限速', '减速带', '路灯', '交通信号灯', '掉头', '人行横道']" >> data.yaml
完成环境配置后,即可进行模型训练。这一过程涉及调用YOLO的训练函数,指定数据集配置文件、图像大小和其他超参数。模型将在数小时到数天内学习道路病害的特征,并在训练完成后保存模型以供后续推理使用。在训练过程中,监控损失函数和精度指标是确保模型学习效果的重要环节。
import torch
from yolov5 import train
# 设置训练参数
train.run(
data='data.yaml', # 数据集配置文件路径
imgsz=640, # 输入图像大小
batch=16, # 每批次图像数量
epochs=100, # 训练轮数
weights='yolov5s.pt', # 预训练模型路径
workers=4 # 数据加载线程数
)
print("训练完成,模型保存于 runs/train/exp/weights/best.pt")
训练完成后,下一步是进行模型评估,以验证其在验证集上的表现。此过程可以通过调用YOLO的评估函数,计算模型在验证集上的平均精度(mAP)等指标。评估过程中,模型将对验证集中的图像进行推理,并生成检测结果,以帮助分析模型的准确性和鲁棒性。确保在评估过程中使用与训练相同的图像大小和其他超参数。
四、总结
道路病害检测系统利用深度学习技术,旨在自动识别和分类道路病害,提升城市交通管理效率。数据集包括多个分类:裂缝、大坑、小坑、交通标志(左箭头、禁止停车、限速等)以及其他相关特征(如车辙、路灯和人行横道)。在数据集准备完成后,项目首先进行环境配置,创建虚拟环境并安装必要的深度学习库和YOLO工具。随后,使用YOLO模型进行训练,系统学习道路病害的特征,训练完成后保存模型。接着,进行模型评估,计算其在验证集上的表现,以确保准确性和鲁棒性。该系统能够实时监测道路状况,及时发现潜在的安全隐患,从而提升道路维护的科学性,保障行车安全,为智能交通管理提供有力支持。
更多推荐

 38
38 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)