AT32F437VM SPI驱动AT7456E OSD芯片
上篇文章讲了BF固件中关于OSD的代码部分,今天来看一下硬件部分。使用AT的芯片配置SPI和OSD芯片通讯。
·
上篇文章讲了BF固件中关于OSD的代码部分,今天来看一下硬件部分。
使用AT的芯片配置SPI和OSD芯片通讯。
先配置一下AT32F437的时钟:
/**
**************************************************************************
* @file at32f435_437_clock.c
* @brief system clock config program
**************************************************************************
* Copyright notice & Disclaimer
*
* The software Board Support Package (BSP) that is made available to
* download from Artery official website is the copyrighted work of Artery.
* Artery authorizes customers to use, copy, and distribute the BSP
* software and its related documentation for the purpose of design and
* development in conjunction with Artery microcontrollers. Use of the
* software is governed by this copyright notice and the following disclaimer.
*
* THIS SOFTWARE IS PROVIDED ON "AS IS" BASIS WITHOUT WARRANTIES,
* GUARANTEES OR REPRESENTATIONS OF ANY KIND. ARTERY EXPRESSLY DISCLAIMS,
* TO THE FULLEST EXTENT PERMITTED BY LAW, ALL EXPRESS, IMPLIED OR
* STATUTORY OR OTHER WARRANTIES, GUARANTEES OR REPRESENTATIONS,
* INCLUDING BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT.
*
**************************************************************************
*/
/* includes ------------------------------------------------------------------*/
#include "at32f435_437_clock.h"
/**
* @brief system clock config program
* @note the system clock is configured as follow:
* - system clock = (hext * pll_ns)/(pll_ms * pll_fr)
* - system clock source = pll (hext)
* - hext = 8000000
* - sclk = 72000000
* - ahbdiv = 1
* - ahbclk = 72000000
* - apb1div = 2
* - apb1clk = 36000000
* - apb2div = 2
* - apb2clk = 36000000
* - pll_ns = 144
* - pll_ms = 1
* - pll_fr = 16
* @param none
* @retval none
*/
void system_clock_config(void)
{
/* enable pwc periph clock */
crm_periph_clock_enable(CRM_PWC_PERIPH_CLOCK, TRUE);
/* config ldo voltage */
pwc_ldo_output_voltage_set(PWC_LDO_OUTPUT_1V0);
/* set the flash clock divider */
flash_clock_divider_set(FLASH_CLOCK_DIV_2);
/* reset crm */
crm_reset();
/* enable hext */
crm_clock_source_enable(CRM_CLOCK_SOURCE_HEXT, TRUE);
/* wait till hext is ready */
while(crm_hext_stable_wait() == ERROR)
{
}
/* config pll clock resource
common frequency config list: pll source selected hick or hext(8mhz)
_______________________________________________________________________________________
| | | | | | | | | |
|pll(mhz)| 288 | 252 | 216 | 180 | 144 | 108 | 72 | 36 |
|________|_________|_________|_________|_________|_________|_________|_________________|
| | | | | | | | | |
|pll_ns | 72 | 63 | 108 | 90 | 72 | 108 | 72 | 72 |
| | | | | | | | | |
|pll_ms | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| | | | | | | | | |
|pll_fr | FR_2 | FR_2 | FR_4 | FR_4 | FR_4 | FR_8 | FR_8 | FR_16|
|________|_________|_________|_________|_________|_________|_________|________|________|
if pll clock source selects hext with other frequency values, or configure pll to other
frequency values, please use the at32 new clock configuration tool for configuration. */
crm_pll_config(CRM_PLL_SOURCE_HEXT, 144, 1, CRM_PLL_FR_16);
/* enable pll */
crm_clock_source_enable(CRM_CLOCK_SOURCE_PLL, TRUE);
/* wait till pll is ready */
while(crm_flag_get(CRM_PLL_STABLE_FLAG) != SET)
{
}
/* config ahbclk */
crm_ahb_div_set(CRM_AHB_DIV_1);
/* config apb2clk */
crm_apb2_div_set(CRM_APB2_DIV_2);
/* config apb1clk */
crm_apb1_div_set(CRM_APB1_DIV_2);
/* select pll as system clock source */
crm_sysclk_switch(CRM_SCLK_PLL);
/* wait till pll is used as system clock source */
while(crm_sysclk_switch_status_get() != CRM_SCLK_PLL)
{
}
/* update system_core_clock global variable */
system_core_clock_update();
}
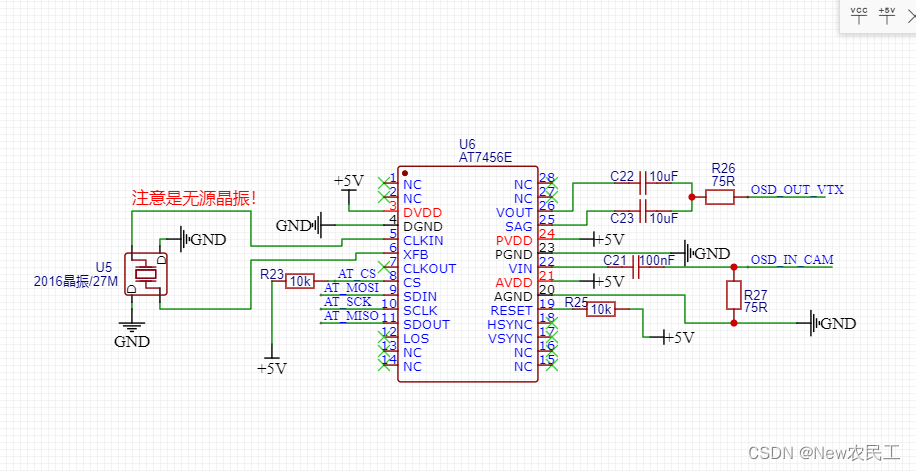
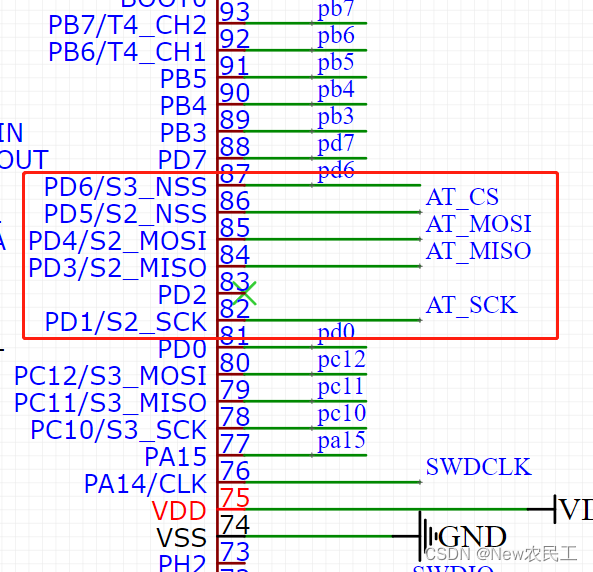
osd芯片连接原理图:
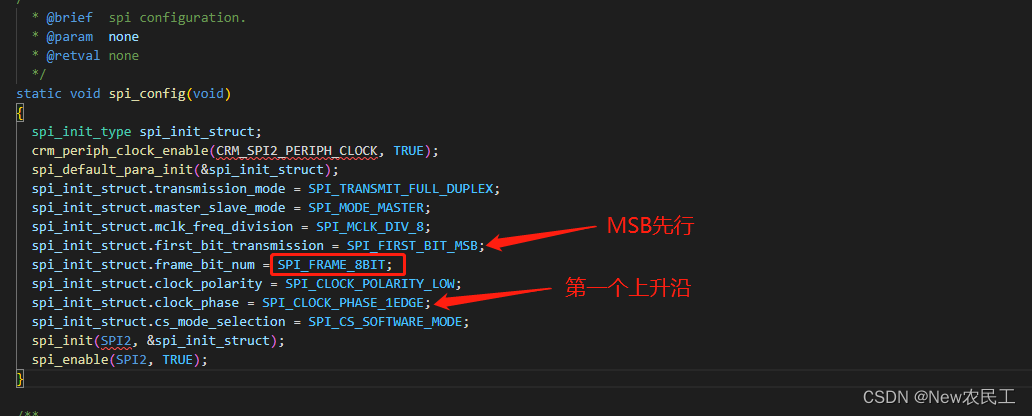
接下来SPI配置:
static void spi_config(void)
{
spi_init_type spi_init_struct;
crm_periph_clock_enable(CRM_SPI2_PERIPH_CLOCK, TRUE);
spi_default_para_init(&spi_init_struct);
spi_init_struct.transmission_mode = SPI_TRANSMIT_FULL_DUPLEX;
spi_init_struct.master_slave_mode = SPI_MODE_MASTER;
spi_init_struct.mclk_freq_division = SPI_MCLK_DIV_8;
spi_init_struct.first_bit_transmission = SPI_FIRST_BIT_MSB;
spi_init_struct.frame_bit_num = SPI_FRAME_8BIT;
spi_init_struct.clock_polarity = SPI_CLOCK_POLARITY_LOW;
spi_init_struct.clock_phase = SPI_CLOCK_PHASE_1EDGE;
spi_init_struct.cs_mode_selection = SPI_CS_SOFTWARE_MODE;
spi_init(SPI2, &spi_init_struct);
spi_enable(SPI2, TRUE);
}
/**
* @brief gpio configuration.
* @param none
* @retval none
*/
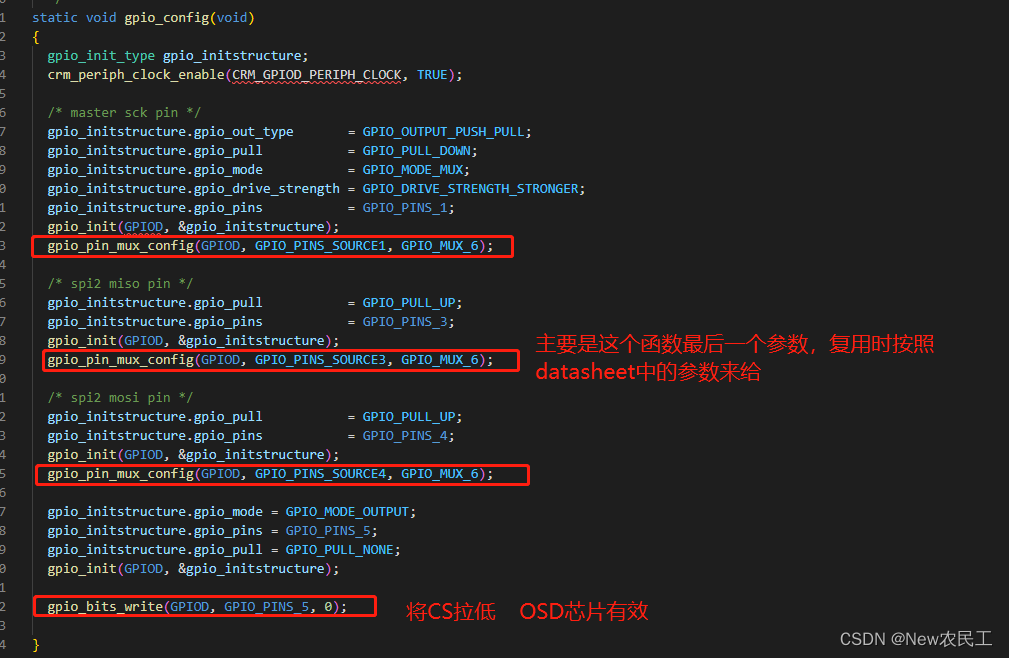
static void gpio_config(void)
{
gpio_init_type gpio_initstructure;
crm_periph_clock_enable(CRM_GPIOD_PERIPH_CLOCK, TRUE);
/* master sck pin */
gpio_initstructure.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_initstructure.gpio_pull = GPIO_PULL_DOWN;
gpio_initstructure.gpio_mode = GPIO_MODE_MUX;
gpio_initstructure.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;
gpio_initstructure.gpio_pins = GPIO_PINS_1;
gpio_init(GPIOD, &gpio_initstructure);
gpio_pin_mux_config(GPIOD, GPIO_PINS_SOURCE1, GPIO_MUX_6);
/* spi2 miso pin */
gpio_initstructure.gpio_pull = GPIO_PULL_UP;
gpio_initstructure.gpio_pins = GPIO_PINS_3;
gpio_init(GPIOD, &gpio_initstructure);
gpio_pin_mux_config(GPIOD, GPIO_PINS_SOURCE3, GPIO_MUX_6);
/* spi2 mosi pin */
gpio_initstructure.gpio_pull = GPIO_PULL_UP;
gpio_initstructure.gpio_pins = GPIO_PINS_4;
gpio_init(GPIOD, &gpio_initstructure);
gpio_pin_mux_config(GPIOD, GPIO_PINS_SOURCE4, GPIO_MUX_6);
gpio_initstructure.gpio_mode = GPIO_MODE_OUTPUT;
gpio_initstructure.gpio_pins = GPIO_PINS_5;
gpio_initstructure.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOD, &gpio_initstructure);
gpio_bits_write(GPIOD, GPIO_PINS_5, 0);
}主要注意下面的点
SPI收发函数,因为是全双工模式,所以这里发送和接收在一个函数中。具体可以看上一篇文章说明了为什么要一起做。
/*************************************************************
** Function name: SPI2SendAndReceviceOneByte
** Descriptions: 使用全双工模式的spi进行发送同时接收一字节数据
** Input parameters: None
** Output parameters: None
** Returned value: None
** Remarks: None
*************************************************************/
uint8_t SPI2SendAndReceviceOneByte(uint8_t data){
while(spi_i2s_flag_get(SPI2, SPI_I2S_TDBE_FLAG) == RESET);
spi_i2s_data_transmit(SPI2, MAX7456ADD_STAT);
while(spi_i2s_flag_get(SPI2, SPI_I2S_RDBF_FLAG) == RESET);
return (uint8_t)spi_i2s_data_receive(SPI2);
}
我之前是分开写的,像是下面的样子:发送了两次,接收一次。这样是错误的
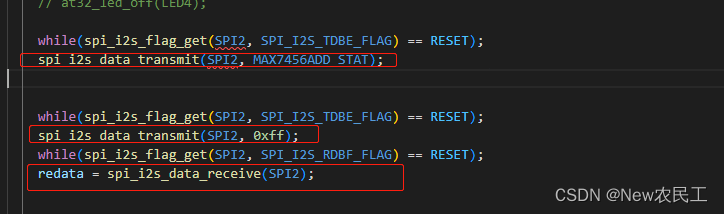
因为第一次是发送数据,所以没接收。但是发现程序只能成功接收一次。
原因:每次发送的同时都会接收数据,如果这次发送完成后,没有将数据读出来。之后的数据就不会覆盖没读出来的数据,导致往后接收失败。
正确写法:
int main(void)
{
uint16_t redata = 0;
system_clock_config();
at32_board_init();
gpio_config();
spi_config();
delay_ms(200);
SEGGER_RTT_printf(0,"Init ok \r\n");
while(1)
{
SPI2SendAndReceviceOneByte(MAX7456ADD_STAT);
redata = SPI2SendAndReceviceOneByte(0xff);
delay_ms(200);
if (redata != 0){
SEGGER_RTT_printf(0,"%d %x\r\n",redata,redata);
}
// delay_us(2);
}
}
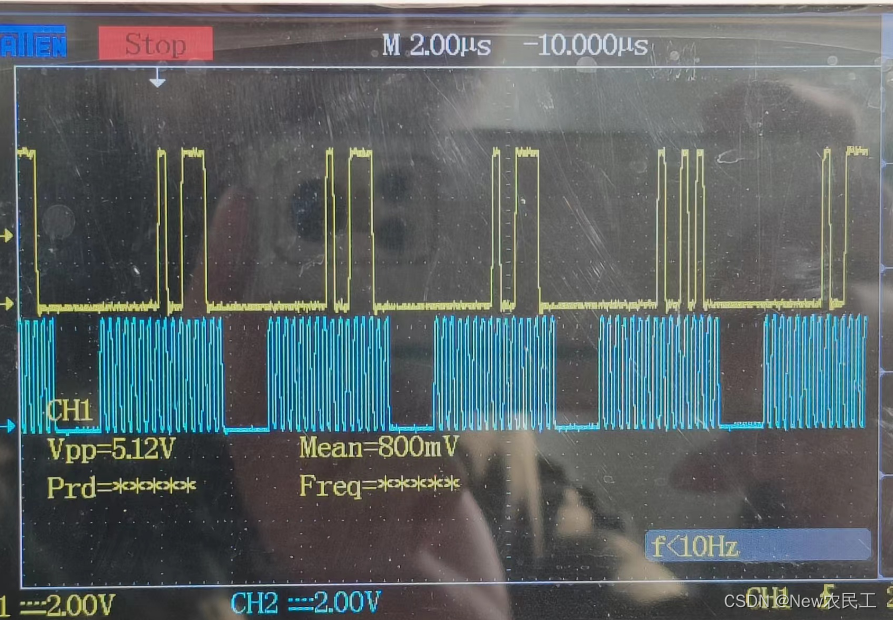
贴个实际的spi信号

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)