根据加速度计、陀螺仪和磁力计数据进行机器人的位姿估计
完整的流程可以简要概括为:1.初始化静态姿态:使用加速度计和磁力计初始化 Roll、Pitch 和 Yaw。2.动态更新:利用陀螺仪数据更新 Roll、Pitch 和 Yaw。3.传感器融合:使用互补滤波或卡尔曼滤波进行姿态数据融合,减小漂移。4.四元数表示和更新:用四元数表示姿态,避免欧拉角的万向节死锁问题。5.位姿估计:结合姿态和加速度计数据,估算机器人在三维空间中的位姿(包括姿态和位置)。
要通过加速度计、陀螺仪和磁力计数据进行机器人的位姿估计,可以使用传感器融合算法,将它们结合起来提供完整、稳定的位姿信息。以下是一个详细的步骤指南:
1. 数据预处理
滤波:对加速度计、陀螺仪和磁力计数据进行低通滤波,以减少噪声。
校准:确保传感器已校准,包括磁力计的软铁和硬铁校正,以减少环境磁场的影响。
对传感器数据进行误差标定,得到可靠真实的传感器数据
2. 初始化静态姿态
在机器人静止或运动较慢时,可以使用加速度计和磁力计数据来初始化姿态的欧拉角表示【Roll(滚转)、Pitch(俯仰) 和 Yaw(偏航)】:
eg: IMU 采集的 angle: 103.645 -77.300 -95.526 代表 欧拉角中的 **Roll(滚转)、Pitch(俯仰)和 Yaw(偏航)**角度,单位通常是 度(°)。这些角度分别表示 IMU 在三个轴上的旋转情况:
103.645:绕 X 轴的旋转角度,即 Roll(滚转)角。
-77.300:绕 Y 轴的旋转角度,即 Pitch(俯仰)角。
-95.526:绕 Z 轴的旋转角度,即 Yaw(偏航)角。
这些角度描述了 IMU 在三维空间中的姿态:
Roll = 103.645°:IMU 绕自身 X 轴旋转了 103.645°,通常表示左右翻转的角度。
Pitch = -77.300°:IMU 绕 Y 轴旋转了 -77.300°,通常表示前后俯仰的角度。
Yaw = -95.526°:IMU 绕 Z 轴旋转了 -95.526°,通常表示水平旋转的角度。
·Roll和Pitch(基于加速度计数据xyz轴的加速度)
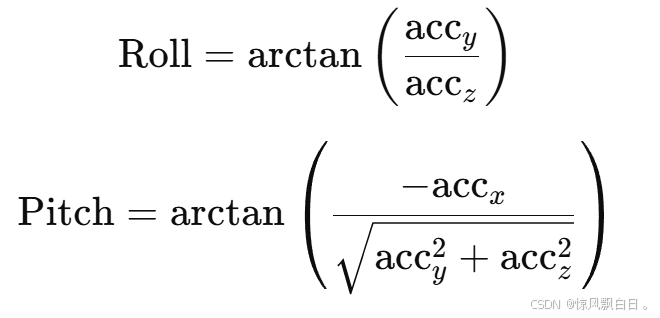
·Yaw(基于磁力计数据)
由于地磁场和重力不在同一平面,需要先根据 Roll 和 Pitch 对磁力计数据进行旋转,以消除其在非水平面上的影响。
3.利用陀螺仪进行动态更新
通过对陀螺仪的角速度进行积分,可以得到角度变化量,并结合之前的姿态角进行更新。
将角速度积分计算得出的增量添加到 Roll、Pitch 和 Yaw 上。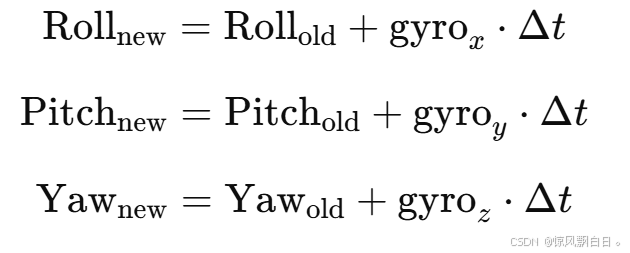
4.传感器融合
为了减少误差和漂移,使用传感器融合算法,将陀螺仪的角速度和加速度计、磁力计的角度信息结合起来:
·互补滤波:一种简单的传感器融合方法。互补滤波将陀螺仪数据和加速度计/磁力计数据进行加权平均:
α 是权重系数,通常选取0.98左右,使得短期内主要依赖陀螺仪数据,而长期倾向于加速度计和磁力计数据。
卡尔曼滤波:适合更复杂的动态环境。
卡尔曼滤波可以综合考虑系统状态预测和观测更新,将陀螺仪、加速度计和磁力计数据进行最佳估计。
卡尔曼滤波将状态分为预测和更新两个阶段,根据预测误差调整系统状态。
5.使用四元数进行姿态表示和更新
为了避免欧拉角的万向节死锁问题,将姿态转换为四元数表示。通过四元数更新公式进行实时更新:
四元数更新:
四元数更新完毕后,可以根据需求将其转换为欧拉角,用于其他位置或角度计算。
6.姿态积分估计位置
在姿态估计得到之后,还可以将加速度计数据转换为世界坐标系中的加速度,并对其进行二次积分,从而估算出位置。然而,由于加速度的二次积分对误差非常敏感,通常不推荐仅依赖加速度计估算位置,需要结合其他位置参考(如视觉传感器或 GPS)进行位置修正。
总结
完整的流程可以简要概括为:
1.初始化静态姿态:使用加速度计和磁力计初始化 Roll、Pitch 和 Yaw。
2.动态更新:利用陀螺仪数据更新 Roll、Pitch 和 Yaw。
3.传感器融合:使用互补滤波或卡尔曼滤波进行姿态数据融合,减小漂移。
4.四元数表示和更新:用四元数表示姿态,避免欧拉角的万向节死锁问题。
5.位姿估计:结合姿态和加速度计数据,估算机器人在三维空间中的位姿(包括姿态和位置)。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)